Appearance
寻位跟踪工艺
设置激光器参数
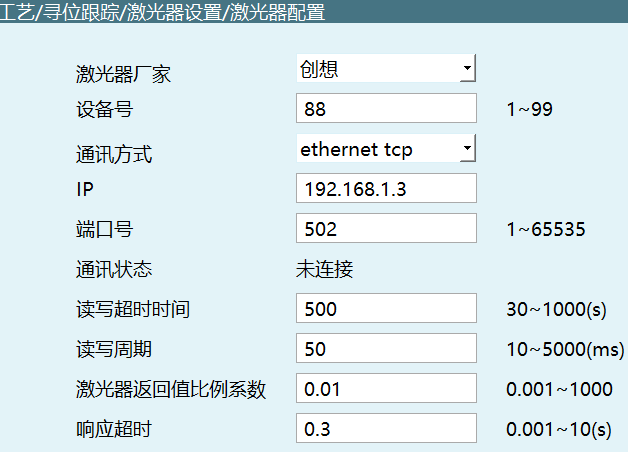
设置激光器配置参数
0x4130 TRACK_LASER_PARAM_SET
json
{
"fileNum": 1,
"laserParam": {
"communication": 1,
"devid": 1,
"ip": "192.168.1.3",
"port": 502,
"responseTimeout": 0.3,
"scaleFactor": 0.01,
"timeLimit": 500.0,
"timePeriod": 50.0,
"vendor": "创想"
},
"robot": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| fileNum | int | 是 | 激光器文件号 |
| robot | int | 是 | 机器人编号 |
| laserParam.communication | int | 是 | 通讯方式:0-modbus tcp,1-ethernet tcp |
| laserParam.devid | int | 是 | 设备号 |
| laserParam.ip | string | 是 | IP地址 |
| laserParam.port | int | 是 | 端口号 |
| laserParam.responseTimeout | float | 否 | 响应超时 |
| laserParam.scaleFactor | float | 否 | 激光器放回值比例系数 |
| laserParam.timeLimit | float | 否 | 读写超时时间(ms) |
| laserParam.timePeriod | float | 否 | 读写周期(ms) |
| laserParam.vendor | string | 否 | 激光器厂家 |
查询激光器参数
0x4131 TRACK_LASER_PARAM_INQUIRE
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
返回的响应激光器参数
0x4132 TRACK_LASER_PARAM_RESPOND
json
{
"fileNum": 1,
"laserParam": {
"commLog": false,
"communication": 0,
"devid": 88,
"ip": "192.168.1.3",
"netstate": false,
"port": 502,
"responseTimeout": 0.3,
"scaleFactor": 0.01,
"timeLimit": 500.0,
"timePeriod": 50,
"vendor": "创想",
"vendorlist": [
"通用",
"创想",
"锐博视",
"睿牛",
"同舟科技",
"中科宏伟",
"全视智能",
"省工智能",
"康普曼",
"青东"
]
},
"robot": 1
}| 参数名 | 类型 | 说明 |
|---|---|---|
| fileNum | int | 激光器文件号 |
| robot | int | 机器人编号 |
| laserParam.commLog | bool | 通讯日志 |
| laserParam.communication | int | 通讯方式:0-modbus tcp,1-ethernet tcp |
| laserParam.devid | int | 设备号 |
| laserParam.ip | string | IP地址 |
| laserParam.netstate | bool | 网络状态 |
| laserParam.port | int | 端口号 |
| laserParam.responseTimeout | float | 响应超时 |
| laserParam.scaleFactor | float | 激光器放回值比例系数 |
| laserParam.timeLimit | float | 读写超时时间(ms) |
| laserParam.timePeriod | float | 读写周期(ms) |
| laserParam.vendor | string | 激光器厂家 |
| laserParam.vendorlist | array | 激光器厂家列表 |
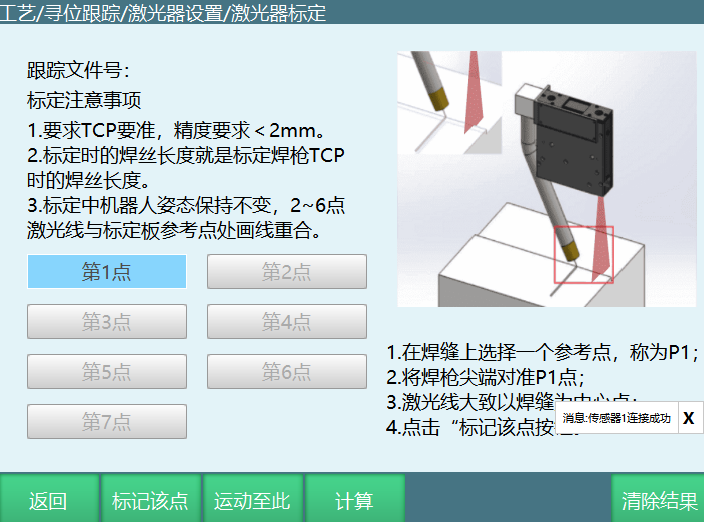
激光器标定
标定记录查询
0x4140 SENSOR_LASER_CALIBRATE_INQUIRE
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
返回0x4140查询结果
0x4141 SENSOR_LASER_CALIBRATE_RESPOND
json
{
"robot": 1,
"fileNum": 1,
"recordResult": {
"point1": false,
"point2": false,
"point3": false,
"point4": false,
"point5": false,
"point6": false,
"point7": false
}
}| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| fileNum | int | 激光器文件号 |
| recordResult.point1~7 | bool | 各标定点记录结果 |
记录标定点
0x4142 SENSOR_LASER_CALIBRATE_RECORD
json
{
"robot": 1,
"fileNum": 1,
"pointNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
| pointNum | int | 是 | 标定点编号(范围1~7) |
查询标定结果
0x4143 SENSOR_LASER_CALIBRATE_RECORD_RESPOND
json
{
"robot": 1,
"fileNum": 1,
"pointNum": 1,
"recordResult": true
}| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| fileNum | int | 激光器文件号 |
| pointNum | int | 标定点编号 |
| recordResult | bool | 记录结果 |
运动到标定点
0x4144 SENSOR_LASER_CALIBRATE_MOVETO
json
{
"robot": 1,
"fileNum": 1,
"pointNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
| pointNum | int | 是 | 标定点编号 |
计算标定结果
0x4145 SENSOR_LASER_CALIBRATE_CALCULATE
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
返回0x4145计算结果
0x4146 SENSOR_LASER_CALIBRATE_CALCULATE_RESPOND
json
{
"robot": 1,
"fileNum": 1,
"result": true
}| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| fileNum | int | 激光器文件号 |
| result | bool | 计算结果 |
清空标定记录
0x4147 SENSOR_LASER_CALIBRATE_CLEAR
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
返回0x4141
取消标定
0x4148 SENSOR_LASER_CALIBRATE_CANCEL
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
查询激光器是否标定
0x4149 SENSOR_LASER_CALIBRATE_RESULT_INQUIRE
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
响应0x4149查询结果
0x414A SENSOR_LASER_CALIBRATE_RESULT_RESPOND
json
{
"robot": 1,
"fileNum": 1,
"laserCalibrated": false
}| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| fileNum | int | 激光器文件号 |
| laserCalibrated | bool | 是否已标定 |
设置寻位类型
0x4133 LOCATING_SENSORTYPE_SET
json
{
"fileNum": 77,
"robot": 1,
"sensorType": 0
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| fileNum | int | 是 | 激光器文件号 |
| robot | int | 是 | 机器人编号 |
| sensorType | int | 是 | 寻位类型:0-线激光,1-电弧 |
查询寻位类型
0x4134 LOCATING_SENSORTYPE_INQUIRE
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
响应寻位类型
0x4135 LOCATING_SENSORTYPE_RESPOND
json
{
"robot": 1,
"fileNum": 1,
"sensorType": 0
}| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| fileNum | int | 激光器文件号 |
| sensorType | int | 寻位类型:0-线激光,1-电弧 |
设置跟踪类型
0x4169 TRACK_SENSORTYPE_SET
json
{
"robot": 1,
"fileNum": 1,
"sensorType": 0
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
| sensorType | int | 是 | 跟踪类型:0-线激光,1-电弧,2-弧压 |
查询跟踪类型
0x4170 TRACK_SENSORTYPE_INQUIRE
json
{
"robot": 1,
"fileNum": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
返回0x4170查询结果
0x4171 TRACK_SENSORTYPE_RESPOND
同0x4169
设置激光跟踪参数表
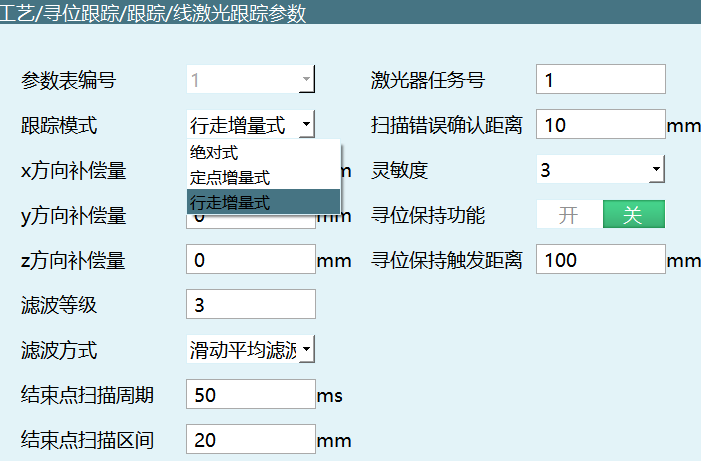
0x4136 TRACK_LASER_TRACKPARAM_SET
json
{
"fileNum": 1,
"robot": 1,
"tableid": 98,
"trackParam": {
"compensateX": 1.0,
"compensateY": 2.0,
"compensateZ": 3.0,
"din_end": 0,
"dout_part_move": -1,
"endPoint": {
"interval": 6.0,
"scanPeriod": 5.0
},
"filter": {
"level": 4,
"type": 1
},
"laserTaskId": 7,
"positionHold": {
"distance": 100.0,
"switchon": false
},
"scanErrorLength": 8.0,
"sensitivity": 3,
"trackMode": 0
}
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| fileNum | int | 是 | 激光器文件号 |
| robot | int | 是 | 机器人编号 |
| tableid | int | 是 | 跟踪模式 |
| trackParam.compensateX | float | 否 | x方向补偿量 |
| trackParam.compensateY | float | 否 | y方向补偿量 |
| trackParam.compensateZ | float | 否 | z方向补偿量 |
| trackParam.din_end | int | 否 | 跟踪结束输入IO |
| trackParam.dout_part_move | int | 否 | 工件旋转输出IO |
| trackParam.endPoint.interval | float | 否 | 结束点扫描区间 |
| trackParam.endPoint.scanPeriod | float | 否 | 结束点扫描周期 |
| trackParam.filter.level | int | 否 | 滤波等级 |
| trackParam.filter.type | int | 否 | 滤波方式:0-无,1-滑动平均滤波 |
| trackParam.laserTaskId | int | 否 | 激光器任务号 |
| trackParam.positionHold.distance | float | 否 | 寻位保持触发距离 |
| trackParam.positionHold.switchon | bool | 否 | 寻位保存功能:true开启,false关闭 |
| trackParam.scanErrorLength | float | 否 | 扫描错误确认距离 |
| trackParam.sensitivity | int | 否 | 灵敏度 |
| trackParam.trackMode | int | 否 | 跟踪模式:0-绝对式,1-定点增量式,2-行走增量式 |
查询激光跟踪参数
0x4137 TRACK_LASER_TRACKPARAM_INQUIRE
json
{
"robot": 1,
"fileNum": 1,
"tableid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
| tableid | int | 是 | 参数表编号 |
响应激光跟踪参数
0x4138 TRACK_LASER_TRACKPARAM_RESPOND
Data:同0x4136
寻位参数表

设置寻位参数
0x4139 TRACK_LASER_SEARCHPARAM_SET
json
{
"fileNum": 1,
"robot": 1,
"searchParam": {
"compensateX": 2.0,
"compensateY": 3.0,
"compensateZ": 4.0,
"dynamic": {
"distance": 5.0,
"pointIndex": 7,
"speed": 6.0
},
"laserTaskId": 1,
"storeType": 1
},
"tableid": 3
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| fileNum | int | 是 | 寻位文件号 |
| robot | int | 是 | 机器人编号 |
| tableid | int | 是 | 参数表编号 |
| searchParam.compensateX | float | 否 | x方向补偿量 |
| searchParam.compensateY | float | 否 | y方向补偿量 |
| searchParam.compensateZ | float | 否 | z方向补偿量 |
| searchParam.dynamic.distance | float | 否 | 动态寻位距离 |
| searchParam.dynamic.pointIndex | int | 否 | 动态寻位选择 |
| searchParam.dynamic.speed | float | 否 | 动态寻位速度 |
| searchParam.laserTaskId | int | 否 | 激光器任务号 |
| searchParam.storeType | int | 否 | 寻位类型:0-基准寻位,1-修正寻位 |
查询寻位参数
0x413A TRACK_LASER_SEARCHPARAM_INQUIRE
json
{
"robot": 1,
"fileNum": 1,
"tableid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
| tableid | int | 是 | 参数表编号 |
回复寻位参数
0x413B TRACK_LASER_SEARCHPARAM_RESPOND
Data:同0x4139
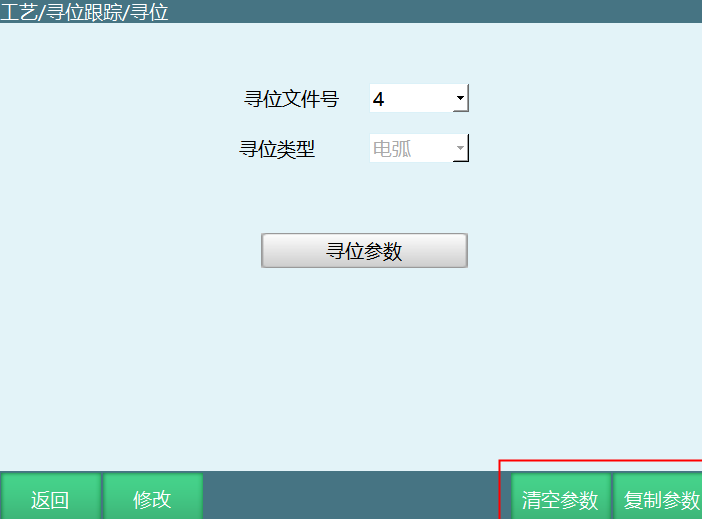
复制寻位参数(复制前要0x413D清空)
0x413C TRACK_SEAMTRACK_PARAM_COPY
json
{
"dstFileNum": 4,
"fileNum": 1,
"function": 1,
"robot": 1,
"sensorType": 0
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| dstFileNum | int | 是 | 复制到的文件号 |
| fileNum | int | 是 | 复制的文件号 |
| function | int | 是 | 0-跟踪,1-寻位 |
| robot | int | 是 | 机器人编号 |
| sensorType | int | 是 | 跟踪类型:0-线激光,1-电弧,2-弧压;寻位类型:0-线激光,1-电弧 |
清空寻位参数
0x413D TRACK_SEAMTRACK_PARAM_CLEAR
json
{
"robot": 1,
"fileNum": 1,
"sensorType": 0,
"function": 0
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| fileNum | int | 是 | 激光器文件号 |
| sensorType | int | 是 | 跟踪类型:0-线激光,1-电弧,2-弧压;寻位类型:0-线激光,1-电弧 |
| function | int | 是 | 0-跟踪,1-寻位 |
注:清空完成,要查询一次参数
电弧跟踪
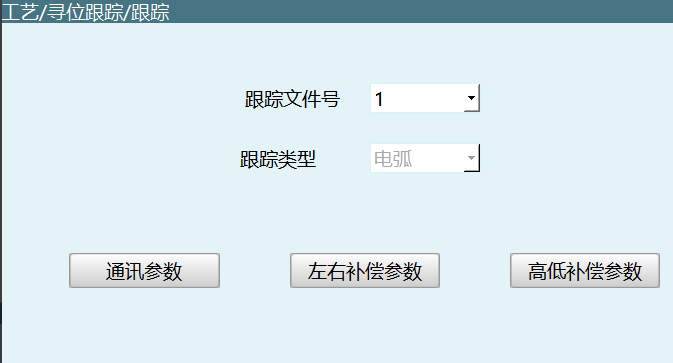
设置通讯参数
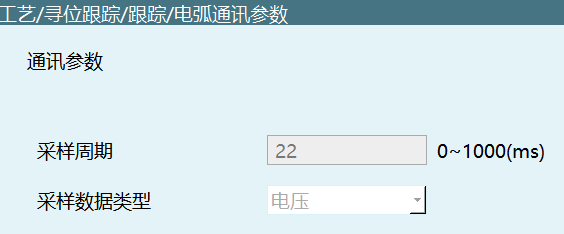
0x4150 TRACK_ARC_COMMPARAM_SET
json
{
"robot": 1,
"craftid": 1,
"sampling": {
"dataType": 0,
"period": 20
}
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
| sampling.dataType | int | 是 | 数据类型:0-电流,1-电压 |
| sampling.period | int | 是 | 采样周期(0~1000) |
查询通讯参数
0x4151 TRACK_ARC_COMMPARAM_INQUIRE
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
响应通讯参数查询
0x4152 TRACK_ARC_COMMPARAM_RESPOND
json
{
"robot": 1,
"craftid": 1,
"sampling": {
"dataType": 0,
"period": 20
}
}| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craftid | int | 跟踪文件号 |
| sampling.dataType | int | 数据类型:0-电流,1-电压 |
| sampling.period | int | 采样周期(0~1000) |
设置左右补偿参数
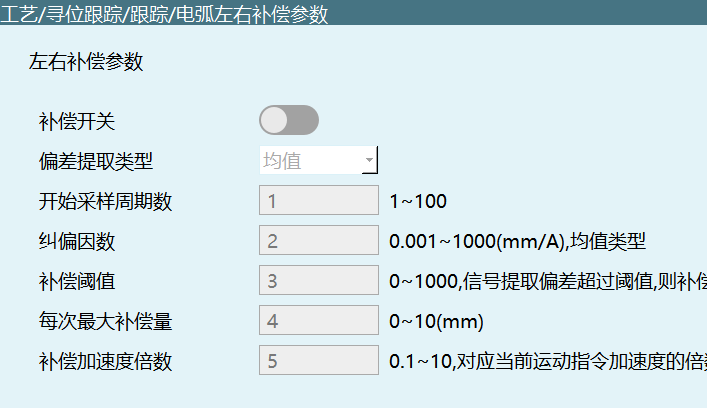
0x4153 TRACK_ARC_LATERALCOMPENPARAM_SET
json
{
"craftid": 1,
"robot": 1,
"lateralCompensation": {
"accFactor": 5.0,
"algorithmType": 0,
"beginCycleNum": 1,
"factor": 2.0,
"maxSingleLen": 4.0,
"switchon": false,
"threshold": 3.0
}
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| craftid | int | 是 | 跟踪文件号 |
| robot | int | 是 | 机器人编号 |
| lateralCompensation.accFactor | float | 否 | 补偿加速度倍数(0.1~10) |
| lateralCompensation.algorithmType | int | 否 | 偏差提取类型:0-均值 |
| lateralCompensation.beginCycleNum | int | 否 | 开始采样周期数(1~1000) |
| lateralCompensation.factor | float | 否 | 纠偏因数(0.001~1000) |
| lateralCompensation.maxSingleLen | float | 否 | 每次最大补偿量(0~10) |
| lateralCompensation.switchon | bool | 否 | 补偿开关 |
| lateralCompensation.threshold | float | 否 | 补偿阈值(0~1000) |
查询左右补偿参数
0x4154 TRACK_ARC_LATERALCOMPENPARAM_INQUIRE
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
返回左右参数查询
0x4155 TRACK_ARC_LATERALCOMPENPARAM_RESPOND
同:0x4153
设置高低补偿参数
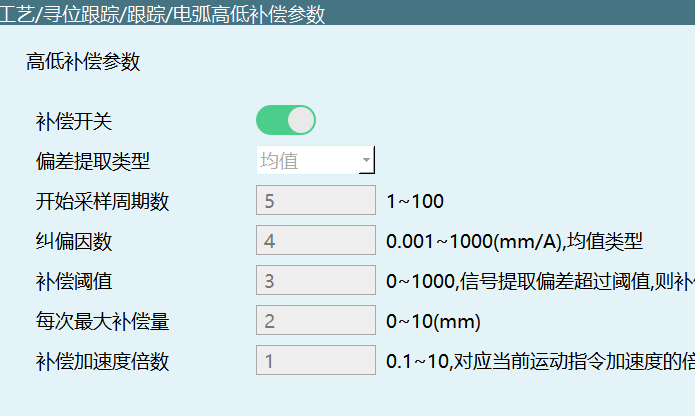
0x4156 TRACK_ARC_VERTICALCOMPENPARAM_SET
json
{
"craftid": 1,
"robot": 1,
"verticalCompensation": {
"accFactor": 1,
"algorithmType": 0,
"beginCycleNum": 5,
"factor": 4,
"maxSingleLen": 2,
"switchon": true,
"threshold": 3
}
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| craftid | int | 是 | 跟踪文件号 |
| robot | int | 是 | 机器人编号 |
| verticalCompensation.accFactor | float | 否 | 补偿加速度倍数 |
| verticalCompensation.algorithmType | int | 否 | 偏差提取类型 |
| verticalCompensation.beginCycleNum | int | 否 | 开始采集周期数 |
| verticalCompensation.factor | float | 否 | 纠偏因数 |
| verticalCompensation.maxSingleLen | float | 否 | 每次最大补偿量 |
| verticalCompensation.switchon | bool | 否 | 补偿开关 |
| verticalCompensation.threshold | float | 否 | 补偿阈值 |
查询高低补偿参数
0x4157 TRACK_ARC_VERTICALCOMPENPARAM_INQUIRE
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
返回高低补偿参数查询
0x4158 TRACK_ARC_VERTICALCOMPENPARAM_RESPOND
同:0x4156
触摸寻位参数

0x4160 SEARCH_TOUCH_PARAM_SET
json
{
"craftid": 1,
"robot": 1,
"touchSearch": {
"2ndAutoDistance": 8.0,
"2ndAutoReturn": true,
"2ndAutoVel": 9.0,
"2ndDeviationLimit": 10.0,
"2ndDistance": 6.0,
"2ndSwitchon": false,
"2ndVel": 7.0,
"autoDistance": 3.0,
"autoReturn": true,
"autoVel": 4.0,
"baseFlag": true,
"compensation": 11.0,
"deviationLimit": 5.0,
"distance": 1.0,
"isChangePose": false,
"vel": 2.0
}
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| craftid | int | 是 | 寻位文件号 |
| robot | int | 是 | 机器人编号 |
| touchSearch.2ndAutoDistance | float | 否 | 二次自动返回距离 |
| touchSearch.2ndAutoReturn | bool | 否 | 二次自动返回使能 |
| touchSearch.2ndAutoVel | float | 否 | 二次自动返回速度 |
| touchSearch.2ndDeviationLimit | float | 否 | 二次超偏差范围 |
| touchSearch.2ndDistance | float | 否 | 二次寻位距离 |
| touchSearch.2ndSwitchon | bool | 否 | 二次寻位使能 |
| touchSearch.2ndVel | float | 否 | 二次寻位速度 |
| touchSearch.autoDistance | float | 否 | 自动返回距离 |
| touchSearch.autoReturn | bool | 否 | 自动返回使能 |
| touchSearch.autoVel | float | 否 | 自动返回速度 |
| touchSearch.baseFlag | bool | 否 | 基准寻位开关 |
| touchSearch.compensation | float | 否 | 运动向量补偿 |
| touchSearch.deviationLimit | float | 否 | 超偏差范围 |
| touchSearch.distance | float | 否 | 寻位距离 |
| touchSearch.isChangePose | bool | 否 | 是否变姿态 |
| touchSearch.vel | float | 否 | 寻位速度 |
查询参数
0x4161 SEARCH_TOUCH_PARAM_INQUIRE
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 寻位文件号 |
响应查询
0x4162 SEARCH_TOUCH_PARAM_RESPOND
参数同0x4160
弧压追踪
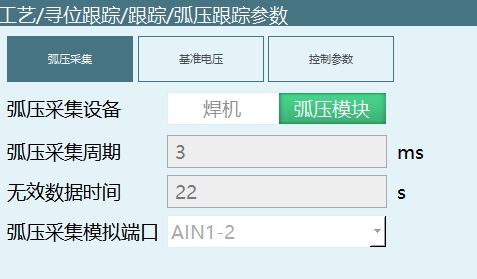
弧压跟踪参数设置
0x4163 ARC_VOLTAGE_TRACK_PARAMETERS_SET
json
{
"base_calc": {
"collect_time": 5.0,
"method": 0,
"vol_inc": 4.0,
"voltage": 3.0
},
"collection": {
"analog_port": 1,
"equipment": 0,
"invalid_data_time": 2.0,
"period": 1
},
"craftid": 1,
"pid": {
"dev_shreshold": 9.0,
"kd": 8.0,
"ki": 7.0,
"kp": 6.0,
"max_iout": 10.0,
"max_out": 11.0
},
"robot": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| craftid | int | 是 | 跟踪文件号 |
| robot | int | 是 | 机器人编号 |
| base_calc.collect_time | float | 否 | 焊接开始计算时间(s) |
| base_calc.method | int | 否 | 基准电压获取方式:0-焊接计算,1-手动计算 |
| base_calc.vol_inc | float | 否 | 计算增量 |
| base_calc.voltage | float | 否 | 基准电压(=计算量+计算增量) |
| collection.analog_port | int | 否 | 弧压采集模拟端口(AIN-1...) |
| collection.equipment | int | 否 | 弧压采集设备:0-焊机,1-弧压模块 |
| collection.invalid_data_time | float | 否 | 无效数据时间(s) |
| collection.period | int | 否 | 采样周期(ms) |
| pid.dev_shreshold | float | 否 | 偏差阈值 |
| pid.kd | float | 否 | 微分系数 |
| pid.ki | float | 否 | 积分系数 |
| pid.kp | float | 否 | 比例系数 |
| pid.max_iout | float | 否 | 积分限幅 |
| pid.max_out | float | 否 | 输出限幅 |
弧压跟踪参数查询
0x4164 ARC_VOLTAGE_TRACK_PARAMETERS_INQUIRE
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
响应弧压跟踪参数查询
0x4165 ARC_VOLTAGE_TRACK_PARAMETERS_RESPOND
同:0x4163
弧压跟踪基准电压计算开启
0x4166 ARC_VOLTAGE_TRACK_BASEVOLTAGE_CALC_START
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
弧压跟踪基准电压计算关闭
0x4167 ARC_VOLTAGE_TRACK_BASEVOLTAGE_CALC_END
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
计算弧压跟踪基准电压
0x4168 ARC_VOLTAGE_TRACK_BASEVOLTAGE_CALC
json
{
"robot": 1,
"craftid": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
返回0x4168计算结果
ARC_VOLTAGE_TRACK_BASEVOLTAGE_CALCURESULTS_GET
json
{
"basic_calc": {
"voltage": 0.0
}
}| 参数名 | 类型 | 说明 |
|---|---|---|
| basic_calc.voltage | float | 基准电压 |
修改弧压跟踪小窗参数
0x416B ARC_VOLTAGE_TRACK_WINDOWSPARAM_SET
json
{
"base_calc": {
"vol_inc": 4.0,
"voltage": 3.0
},
"craftid": 3,
"robot": 1
}| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftid | int | 是 | 跟踪文件号 |
| base_calc.vol_inc | float | 否 | 计算增量 |
| base_calc.voltage | float | 否 | 基准电压 |