Appearance
码垛工艺
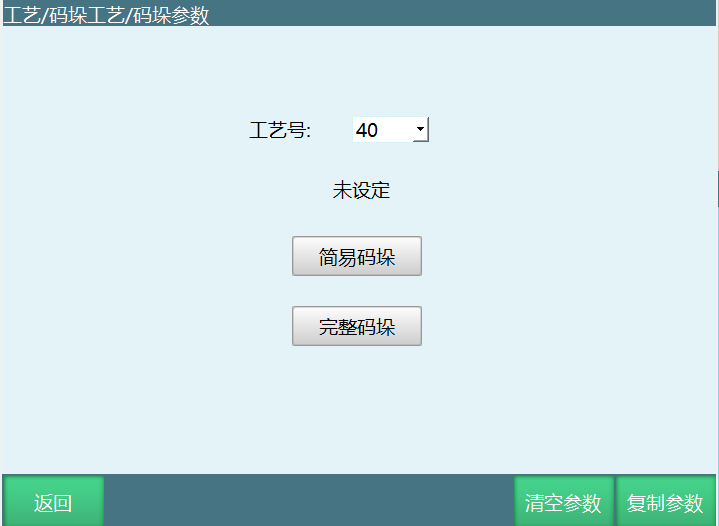
完整码垛
设置抓手参数
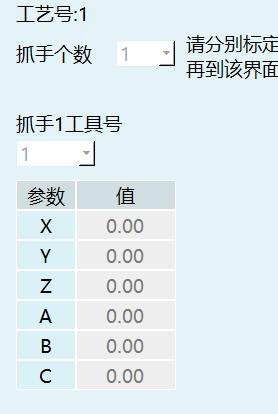
0x4201 PAL_GRIPPER_PARM_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| gripperNum | int | 否 | 抓手个数,范围1~4 |
| gripper | array | 否 | 抓手工具号数组,范围1~9 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"gripperNum": 2,
"gripper": [1, 3, 4, 0]
}
}查询抓手参数
0x4202 PAL_GRIPPER_PARM_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回抓手参数
0x4203 PAL_GRIPPER_PARM_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craftID | int | 工艺号 |
| gripperNum | int | 抓手个数,范围1~4 |
| gripper | array | 抓手工具号数组,范围1~9 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"gripperNum": 2,
"gripper": [1, 3, 4, 0]
}
}设置托盘参数
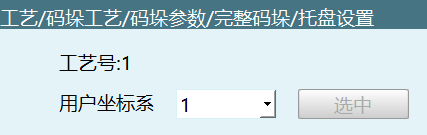
0x4204 PAL_PALLET_PARM_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| userNum | int | 是 | 用户编号 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"userNum": 1
}
}查询托盘参数
0x4205 PAL_PALLET_PARM_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回托盘参数
0x4206 PAL_PALLET_PARM_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craftID | int | 工艺号 |
| userNum | int | 用户编号 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"userNum": 1
}
}设置位置参数
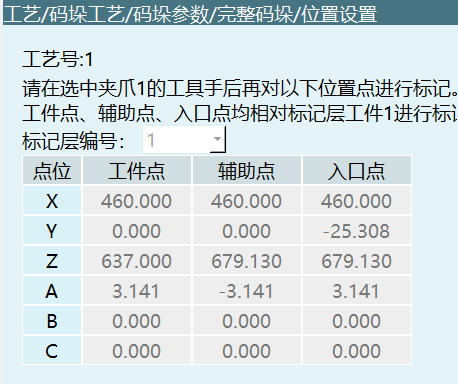
0x4207 PAL_POS_PARM_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| enterPos | array | 是 | 入口点,6个double值 |
| floorNum | int | 否 | 标记层标号 |
| shiftPos | array | 否 | 辅助点,6个double值 |
| realPos | array | 否 | 工件点,6个double值 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"enterPos": [0, 1.1, 222, 3.14159, 0, 0.008],
"floorNum": 1,
"shiftPos": [0, 1.1, 222, 3.14159, 0, 0.008],
"realPos": [0, 1.1, 222, 3.14159, 0, 0.008]
}
}查询位置参数
0x4208 PAL_POS_PARM_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回位置参数
0x4209 PAL_POS_PARM_RESPOND
返回数据同0x4207。
设置工件参数
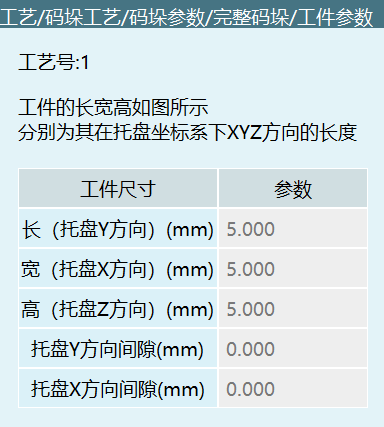
0x420A PAL_WORKPIECE_PARM_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| workpieceLength | double | 否 | 工件长度 |
| workpieceWidth | double | 否 | 工件宽度 |
| workpieceHeight | double | 否 | 工件高度 |
| workpieceGapX | double | 否 | X方向间隙 |
| workpieceGapY | double | 否 | Y方向间隙 |
json
{
"robot": 1,
"craftID": 2,
"pallet": {
"workpieceLength": 1,
"workpieceWidth": 2,
"workpieceHeight": 3,
"workpieceGapX": 4,
"workpieceGapY": 5
}
}查询工件参数
0x420B PAL_WORKPIECE_PARM_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回工件参数
0x420C PAL_WORKPIECE_PARM_RESPOND
返回数据同0x420A。
设置接近参数(2207示教无此功能)
0x420D PAL_APPRO_PARM_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| workpieceApproEnable | bool | 否 | 是否启用接近 |
| workpieceApproMode | int | 否 | 接近模式:0-下降接近,1-接近下降 |
| workpieceApproLenX | double | 否 | X方向接近长度 |
| workpieceApproLenY | double | 否 | Y方向接近长度 |
| workpieceApproLenZ | double | 否 | Z方向接近长度 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"workpieceApproEnable": false,
"workpieceApproMode": 0,
"workpieceApproLenX": 0,
"workpieceApproLenY": 0,
"workpieceApproLenZ": 0
}
}查询接近参数
0x420E PAL_APPRO_PARM_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回接近参数
0x420F PAL_APPRO_PARM_RESPOND
返回数据同0x420D。
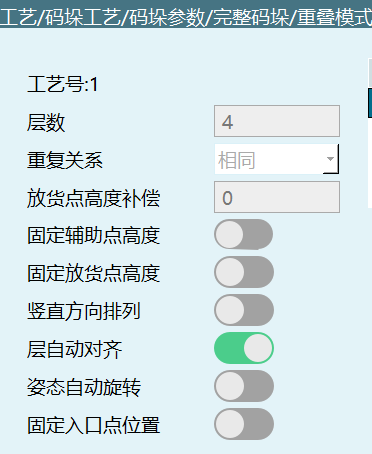
设置重叠模式参数
0x4210 PAL_OVERLAP_PARM_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| floorSum | int | 否 | 层数 |
| overlapType | int | 否 | 重叠类型:0-相同,1-交替,2-自定义 |
| layHeightOffset | double | 否 | 放货点高度补偿 |
| fixedLayHeight | bool | 否 | 固定放货点高度 |
| fixedSupHeight | bool | 否 | 固定辅助点高度 |
| columnLay | bool | 否 | 竖直方向排列 |
| floorAutoJustified | bool | 否 | 层自动对齐 |
| poseAutorotation | bool | 否 | 姿态自动旋转 |
| fixedEnterPoint | bool | 否 | 固定入口点位置 |
| graphicNum | array | 否 | 图形编号 |
| heightRevise | array | 否 | 高度修正 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"floorSum": 1,
"overlapType": 0,
"layHeightOffset": 0.0,
"fixedLayHeight": false,
"fixedSupHeight": false,
"columnLay": false,
"floorAutoJustified": false,
"poseAutorotation": false,
"fixedEnterPoint": false,
"graphicNum": [1, 2, 1, 2],
"heightRevise": [1.1, -2.2]
}
}查询重叠模式参数
0x4211 PAL_OVERLAP_PARM_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回重叠模式参数
0x4212 PAL_OVERLAP_PARM_RESPOND
返回数据同0x4210。
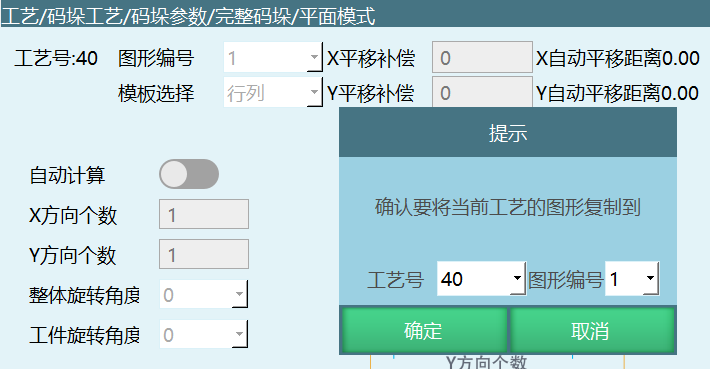
设置平面模式参数
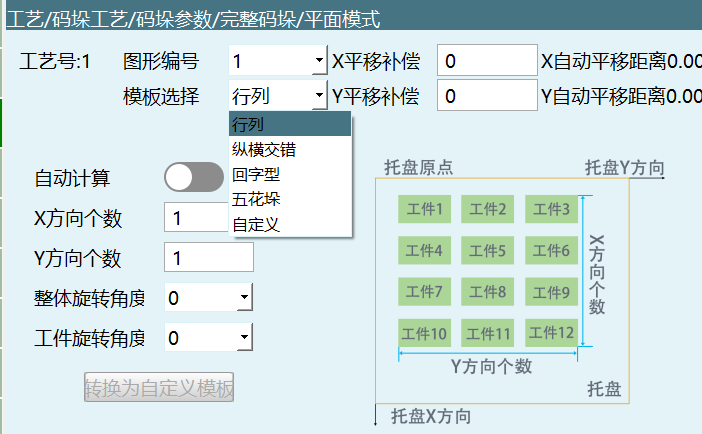
0x4213 PAL_PLANE_PARM_SET
行列模式
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| graphic | int | 是 | 图像编号 |
| graphicType | int | 是 | 图形类型:0-行列,1-纵横交错,2-回字型,3-五花垛,4-自定义 |
| autoCalculate | bool | 否 | 自动计算 |
| numX | double | 否 | X方向个数 |
| numY | double | 否 | Y方向个数 |
| rotationAngleSingle | double | 否 | 工件旋转角度 |
| rotationAngleWhole | double | 否 | 整体旋转角度 |
| transLenX | double | 否 | X平移补偿 |
| transLenY | double | 否 | Y平移补偿 |
json
{
"craftID": 2,
"graphic": 1,
"pallet": {
"graphicType": 0,
"ranks": {
"autoCalculate": true,
"numX": 1.0,
"numY": 1.0,
"rotationAngleSingle": 180.0,
"rotationAngleWhole": 90.0
},
"transLenX": 2.0,
"transLenY": 3.0
},
"robot": 1
}纵横交错模式
json
{
"craftID": 2,
"graphic": 1,
"pallet": {
"graphicType": 1,
"intertwining": {
"numX": 3.0,
"numY": 3.0,
"rotationAngleSingle": -90.0,
"rotationAngleWhole": 90.0
},
"transLenX": 0.0,
"transLenY": 0.0
},
"robot": 1
}回字型模式
json
{
"craftID": 2,
"graphic": 1,
"pallet": {
"gearType": {
"rotationAngleSingle": -90.0,
"rotationAngleWhole": 180.0
},
"graphicType": 2,
"transLenX": 0.0,
"transLenY": 0.0
},
"robot": 1
}五花垛模式
json
{
"craftID": 2,
"graphic": 1,
"pallet": {
"graphicType": 3,
"transLenX": 0.0,
"transLenY": 0.0,
"wideType": {
"A_C_columns": 5.0,
"A_rows": 1.0,
"B_columns": 3.0,
"B_rows": 2.0,
"C_rows": 4.0,
"rotationAngleSingle": 180.0,
"rotationAngleWhole": 90.0
}
},
"robot": 1
}自定义模式
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| graphic | int | 是 | 图像编号 |
| graphicType | int | 是 | 图形类型(4-自定义) |
| transLenX | double | 否 | X平移补偿 |
| transLenY | double | 否 | Y平移补偿 |
| count | int | 是 | 层工件数 |
| sum | int | 是 | 层工件总数 |
| start | int | 是 | 起始编号 |
| eachVec | array | 是 | 每层数据 |
json
{
"craftID": 1,
"graphic": 1,
"pallet": {
"custom": {
"count": 2,
"eachVec": [
{
"X": 1.0,
"Y": 2.0,
"dir": 0,
"h": 4.0,
"t": 3.0
},
{
"X": 5.0,
"Y": 6.0,
"dir": 0,
"h": 8.0,
"t": 7.0
}
],
"start": 1,
"sum": 2
},
"graphicType": 4,
"transLenX": 11.0,
"transLenY": 22.0
},
"robot": 1
}查询平面模式参数
0x4214 PAL_PLANE_PARM_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| graphic | int | 是 | 图像编号 |
json
{
"robot": 1,
"craftID": 1,
"graphic": 1
}返回平面模式参数
0x4215 PAL_PLANE_PARM_RESPOND
返回数据同0x4213。
请求转换为平面模式自定义模板
0x4216 PAL_PLANE_CUSTOM_TRANS_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| graphic | int | 是 | 图像编号 |
json
{
"robot": 1,
"craftID": 1,
"graphic": 1
}返回转换为平面模式自定义模板后对应参数
0x4217 PAL_PLANE_CUSTOM_TRANS_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craftID | int | 工艺号 |
| graphic | int | 图像编号 |
| graphicType | int | 图形类型(此处只能取3) |
| transLenX | double | X平移补偿 |
| transLenY | double | Y平移补偿 |
| autoTransLenX | double | X自动平移距离 |
| autoTransLenY | double | Y自动平移距离 |
| sum | int | 工件总数 |
| start | int | 起始编号 |
| count | int | 当前层工件数 |
| eachVec | array | 工件位置数组 |
json
{
"robot": 1,
"craftID": 1,
"graphic": 1,
"pallet": {
"graphicType": 3,
"transLenX": 2.2,
"transLenY": -3.3,
"autoTransLenX": 4.4,
"autoTransLenY": 5.5,
"custom": {
"sum": 20,
"start": 1,
"count": 10,
"eachVec": [
{"X": 0, "Y": 0, "t": 0, "dir": 0, "h": 0},
{"X": 0, "Y": 0, "t": 0, "dir": 0, "h": 0},
{"X": 0, "Y": 0, "t": 0, "dir": 0, "h": 0}
]
}
}
}请求平面模式预览
0x4218 PAL_PLANE_PREVIEW_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| graphic | int | 是 | 图像编号 |
json
{
"robot": 1,
"craftID": 1,
"graphic": 1
}返回平面模式预览参数
0x4219 PAL_PLANE_PREVIEW_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craftID | int | 工艺号 |
| graphic | int | 图像编号 |
| workpieceLength | double | 工件长度 |
| workpieceWidth | double | 工件宽度 |
| sum | int | 工件总数 |
| start | int | 起始编号 |
| count | int | 当前层工件数 |
| eachVec | array | 工件位置数组 |
json
{
"robot": 1,
"craftID": 1,
"graphic": 1,
"pallet": {
"workpieceLength": 1,
"workpieceWidth": 1,
"sum": 20,
"start": 1,
"count": 10,
"eachVec": [
{"X": 0, "Y": 0, "t": 0},
{"X": 0, "Y": 0, "t": 0},
{"X": 0, "Y": 0, "t": 0}
]
}
}查询完整码垛平面模式自动计算结果
0x422A PAL_AUTO_CALCULATE_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回自动计算结果
0x422B PAL_AUTO_CALCULATE_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| numX | double | X方向个数 |
| numY | double | Y方向个数 |
json
{
"pallet": {
"ranks": {
"numX": 0,
"numY": 0
}
}
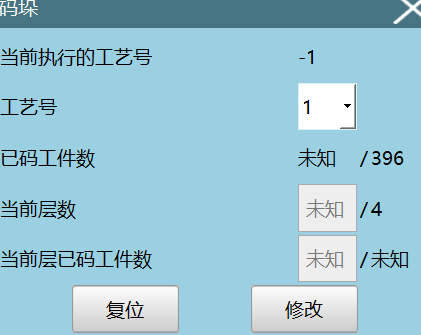
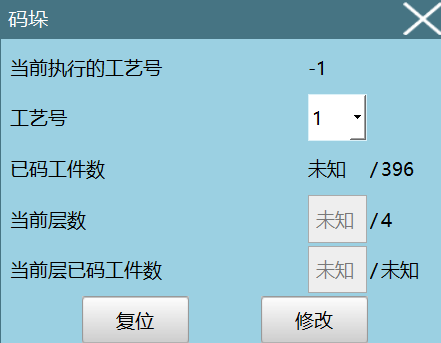
}设置码垛状态
0x421A PAL_STATE_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| curLayerNum | int | 否 | 当前层数 |
| curLayerPalletedWpNum | int | 否 | 当前层已码工件数 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"curLayerNum": 1,
"curLayerPalletedWpNum": 5
}
}查询码垛状态
0x421B PAL_STATE_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回码垛状态
0x421C PAL_STATE_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craftID | int | 工艺号 |
| totalWpNum | int | 总工件数 |
| totalLayerNum | int | 总层数 |
| curPalletedWpSum | int | 当前已码总工件数 |
| curLayerNum | int | 当前层数 |
| curLayerPalletedWpNum | int | 当前层已码工件数 |
| curLayerWpSum | int | 当前层总工件数 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"totalWpNum": 20,
"totalLayerNum": 2,
"curPalletedWpSum": 5,
"curLayerNum": 1,
"curLayerPalletedWpNum": 5,
"curLayerWpSum": 10
}
}复制码垛参数
0x421D PAL_PARM_COPY
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID_source | int | 是 | 源工艺号 |
| craftID_target | int | 是 | 目标工艺号 |
json
{
"robot": 1,
"craftID_source": 1,
"craftID_target": 2
}清空码垛参数
0x421E PAL_PARM_CLEAR
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}复制层图形参数
0x421F PAL_GRAPHIC_COPY
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID_source | int | 是 | 源工艺号 |
| craftID_target | int | 是 | 目标工艺号 |
| graphic_source | int | 是 | 源图形编号 |
| graphic_target | int | 是 | 目标图形编号 |
json
{
"craftID_source": 1,
"craftID_target": 1,
"graphic_source": 1,
"graphic_target": 2,
"robot": 1
}切换使用码垛类型
0x4221 PAL_SIMPLE_SWTICH
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| usePalletType | int | 是 | 码垛类型:0-简易,1-完整,2-未定义 |
json
{
"robot": 1,
"craftID": 1,
"usePalletType": 0
}查询当前使用码垛类型
0x4222 PAL_IS_SIMPLE_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回码垛类型
0x4223 PAL_IS_SIMPLE_RESPOND
返回数据同0x4221。
简易码垛

设置简易码垛位置
0x4224 PAL_SIMPLE_POS_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| O | array | 是 | 工件起始点,6个double值 |
| X | array | 是 | 列点,6个double值 |
| Y | array | 是 | 行点,6个double值 |
| Z | array | 是 | 高度点,6个double值 |
| acrossCorner | array | 否 | 对角点,6个double值 |
| enter | array | 是 | 入口点,6个double值 |
| numX | int | 是 | 行数 |
| numY | int | 是 | 列数 |
| numZ | int | 是 | 层数 |
| shift | array | 否 | 辅助点,6个double值 |
| useAcrossCorner | bool | 否 | 使用对角末端 |
json
{
"O": [456.905, -53.268, 637.0, 3.142, 0.0, 0.116],
"X": [456.905, -53.268, 637.0, 3.142, 0.0, 0.116],
"Y": [456.905, -53.268, 637.0, 3.142, 0.0, 0.116],
"Z": [456.905, -53.268, 637.0, 3.142, 0.0, 0.116],
"acrossCorner": [456.905, -53.268, 637.0, 3.142, 0.0, 0.116],
"craftID": 6,
"enter": [456.905, -53.268, 637.0, 3.142, 0.0, 0.116],
"numX": 2,
"numY": 1,
"numZ": 3,
"robot": 1,
"shift": [456.905, -53.268, 637.0, 3.142, 0.0, 0.116],
"useAcrossCorner": true
}查询简易码垛位置设置
0x4225 PAL_SIMPLE_POS_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回简易码垛位置
0x4226 PAL_SIMPLE_POS_RESPOND
返回数据同0x4224。
设置简易码垛抓手参数
0x4227 PAL_SIMPLE_GRIPPER_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| gripperNum | int | 否 | 抓手个数,范围1~4 |
| gripper | array | 否 | 抓手工具号数组,范围1~9 |
json
{
"robot": 1,
"craftID": 1,
"pallet": {
"gripperNum": 2,
"gripper": [1, 3, 4, 0]
}
}查询简易码垛抓手参数
0x4228 PAL_SIMPLE_GRIPPER_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}返回简易码垛抓手参数
0x4229 PAL_SIMPLE_GRIPPER_RESPOND
返回数据同0x4227。
码垛复位
0x422C PAR_PARM_RESET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
json
{
"robot": 1,
"craftID": 1
}码垛自定义模式拖拽和旋转预览
0x4232 PAL_PLANE_CUSTOM_ROTATE_PREVIEW_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craftID | int | 是 | 工艺号 |
| graphic | int | 是 | 图形编号 |
| count | int | 是 | 工件数 |
| start | int | 是 | 起始编号 |
| sum | int | 是 | 总数 |
| eachVec | array | 是 | 位置数组 |
| rotationAngleWhole | double | 否 | 整体旋转角度 |
| transLenX | double | 否 | X平移补偿 |
| transLenY | double | 否 | Y平移补偿 |
json
{
"craftID": 1,
"graphic": 1,
"pallet": {
"count": 2,
"eachVec": [
{"X": 0.0, "Y": 0.0, "t": 0.0},
{"X": 0.0, "Y": 0.0, "t": 0.0}
],
"start": 1,
"sum": 2
},
"robot": 1,
"rotationAngleWhole": 0,
"transLenX": 0.0,
"transLenY": 0.0
}返回拖拽旋转预览结果
0x4233 PAL_PLANE_CUSTOM_ROTATE_PREVIEW_RESPOND
json
{
"craftID": 1,
"graphic": 1,
"pallet": {
"count": 2,
"eachVec": [
{"X": 0.0, "Y": 0.0, "t": 0.0},
{"X": 0.0, "Y": 0.0, "t": 0.0}
],
"start": 1,
"sum": 2
},
"robot": 1
}点位调试界面
获取全部工件数据
0x4242 PAL_POINTDEBUG_FLOORDATA_INQUIRE
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craft | int | 是 | 工艺号 |
| layer | int | 是 | 层号 |
| clear | int | 否 | 1-清空缓存,0-不清 |
json
{
"robot": 1,
"craft": 1,
"layer": 1,
"clear": 0
}返回全部工件数据
0x4243 PAL_POINTDEBUG_FLOORDATA_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craft | int | 工艺号 |
| layer | int | 层号 |
| sumLayer | int | 总层数 |
| L | double | 工件长度 |
| W | double | 工件宽度 |
| over | int | 超限状态:0-无超限,1-入口点超限,2-辅助点超限,3-工件点超限 |
| overLayer | int | 超限层号 |
| overNum | int | 超限工件号 |
| sum | int | 层工件总数 |
| count | int | 当前层工件数 |
| start | int | 起始编号 |
| eachVec | array | 工件数组 |
json
{
"robot": 1,
"craft": 1,
"layer": 1,
"sumLayer": 10,
"length": {
"L": 10,
"W": 10
},
"overLimit": {
"over": 1,
"layer": 1,
"num": 2
},
"pallet": {
"sum": 25,
"count": 10,
"start": 1,
"eachVec": [
{"X": 0, "Y": 0, "Z": 0, "t": 0, "over": 0},
{"X": 0, "Y": 0, "Z": 0, "t": 0, "over": 0}
]
}
}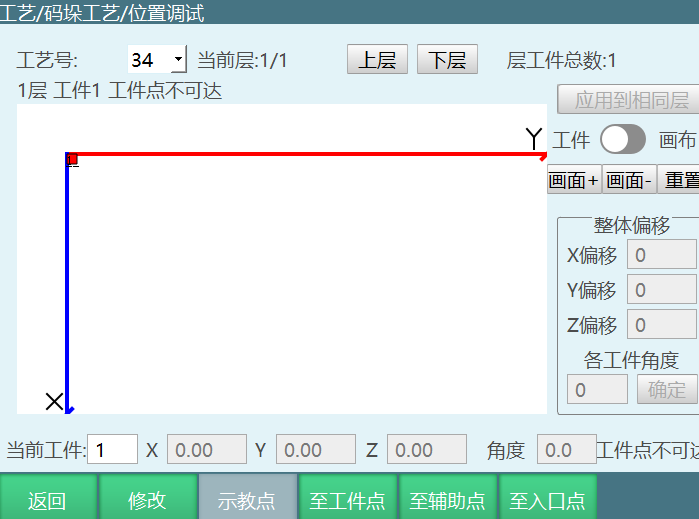
整体偏移
0x4244 PAL_POINTDEBUG_FLOORWHOLETRANS
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craft | int | 是 | 工艺号 |
| layer | int | 是 | 层号 |
| rotationAngle | double | 否 | 偏移角度 |
| transLenX | double | 否 | X偏移 |
| transLenY | double | 否 | Y偏移 |
| transLenZ | double | 否 | Z偏移 |
json
{
"craft": 1,
"layer": 1,
"robot": 1,
"rotationAngle": 95.0,
"transLenX": 1.0,
"transLenY": 2.0,
"transLenZ": 24.0
}应用到相同层
0x4245 PAL_POINTDEBUG_APPLYSAMEFLOOR
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craft | int | 是 | 工艺号 |
| layer | int | 是 | 层号 |
json
{
"craft": 1,
"layer": 2,
"robot": 1
}修改单个工件位置
0x4247 PAL_POINTDEBUG_ONEPOS_SET
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craft | int | 是 | 工艺号 |
| layer | int | 是 | 层号 |
| num | int | 是 | 工件编号 |
| mode | int | 是 | 模式:0-直接设置xyz,1-使用机器人当前位置 |
| X | double | 否 | 工件X坐标 |
| Y | double | 否 | 工件Y坐标 |
| Z | double | 否 | 工件Z坐标 |
| angle | double | 否 | 工件角度 |
json
{
"robot": 1,
"craft": 1,
"layer": 1,
"num": 1,
"mode": 0,
"X": 0.1,
"Y": 0.1,
"Z": 0.1,
"angle": 0
}获取单个工件位置
0x4248 PAL_POINTDEBUG_ONEPOS_INQUIRE
前置得先使用0x4242,才能调用0x4248。
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craft | int | 是 | 工艺号 |
| layer | int | 是 | 层号 |
| num | int | 是 | 工件编号 |
json
{
"robot": 1,
"craft": 1,
"layer": 1,
"num": 1
}返回单个工件位置
0x4249 PAL_POINTDEBUG_ONEPOS_RESPOND
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 |
| craft | int | 工艺号 |
| layer | int | 层号 |
| num | int | 当前工件编号 |
| X | double | 工件X坐标 |
| Y | double | 工件Y坐标 |
| Z | double | 工件Z坐标 |
| t | double | 工件角度 |
| over | int | 超限状态 |
| overLimit | object | 超限详情 |
json
{
"robot": 1,
"craft": 1,
"layer": 1,
"num": 1,
"X": 0.1,
"Y": 0.1,
"Z": 0.1,
"t": 0,
"over": 0,
"overLimit": {
"over": 1,
"layer": 1,
"num": 2
}
}保存点位调试数据到文件
0x424A PAL_POINTDEBUG_SAVEBUFFERDATA
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craft | int | 是 | 工艺号 |
json
{
"robot": 1,
"craft": 1
}运动到工件某位置
0x424D PAL_POINTDEBUG_MOVETOPOS
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| craft | int | 是 | 工艺号 |
| layer | int | 是 | 层号 |
| num | int | 是 | 工件编号 |
| type | int | 是 | 点位类型:0-入口点,1-辅助点,2-工件点 |
json
{
"robot": 1,
"craft": 1,
"layer": 1,
"num": 1,
"type": 0
}