Appearance
标定
工具手标定
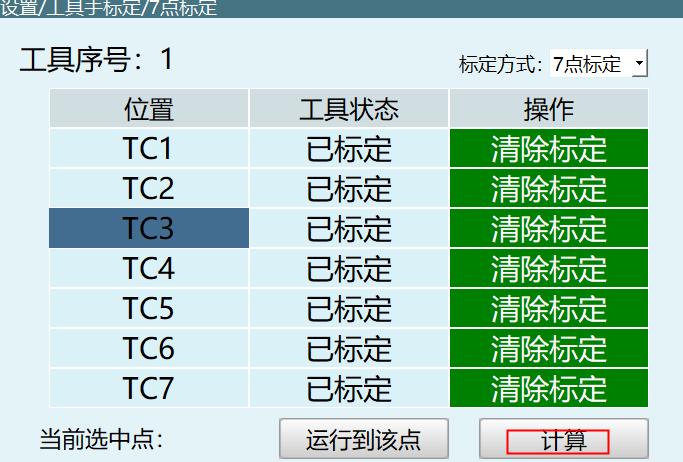
0x3801 TOOLCALIBRATION_SET
设置工具手标定
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手号 |
| calibrationPointNum | int | 设置6点标定或7点标定 |
json
{
"toolNum": 2,
"calibrationPointNum": 6
}0x3804 TOOLCALIBRATION_RESULT
标定计算完成回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| result | bool | 计算是否成功 |
json
{
"result": true
}
0x3802 TOOLCALIBRATION_INQUIRE
查询标定点数据
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| toolNum | int | 工具手号 |
json
{
"pointNum": 2,
"toolNum": 1
}0x3803 TOOLCALIBRATION_RESPOND
返回标定点数据
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| pos | array[6] | 位置数据 [x,y,z,rx,ry,rz] |
json
{
"pointNum": 2,
"pos": [0, 0, 0, 0, 0, 0]
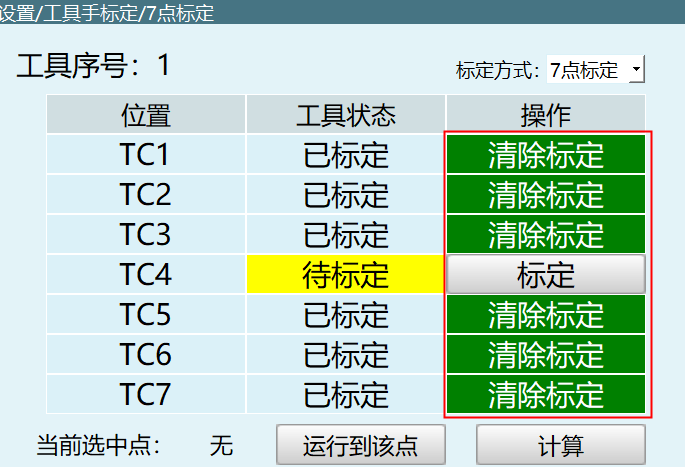
}0x3815 TOOL_CALIBRATION_POINTS_STATUS_INQUIRE
查询标定状态
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手号 |
json
{
"toolNum": 2
}0x3816 TOOL_CALIBRATION_POINTS_STATUS_RESPOND
返回标定状态
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| status | array[7] | 标定状态:1=已标定,0=待标定 |
json
{
"status": [1, 0, 1, 0, 1, 0, 1]
}0x3817 TOOL_CALIBRATION_POINTS_STATUS_CLEAR
清除标定
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| toolNum | int | 工具手号 |
json
{
"pointNum": 2,
"toolNum": 1
}
0x3805 TOOLPARAMETER_SET
设置工具手参数
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| tool.A | float | 绕A轴旋转角度 |
| tool.B | float | 绕B轴旋转角度 |
| tool.C | float | 绕C轴旋转角度 |
| tool.note | string | 注释 |
| tool.payload_inertia | float | 负载惯量 |
| tool.payload_mass | float | 负载质量 |
| tool.payload_mass_center_X | float | 负载质心X |
| tool.payload_mass_center_Y | float | 负载质心Y |
| tool.payload_mass_center_Z | float | 负载质心Z |
| tool.x | float | X轴偏移 |
| tool.y | float | Y轴偏移 |
| tool.z | float | Z轴偏移 |
| toolNum | int | 工具手号 |
json
{
"tool": {
"A": 3.0,
"B": 3.0,
"C": 3.0,
"note": "",
"payload_inertia": 5.0,
"payload_mass": 4.0,
"payload_mass_center_X": 6.0,
"payload_mass_center_Y": 7.0,
"payload_mass_center_Z": 8.0,
"x": 1.0,
"y": 2.0,
"z": 3.0
},
"toolNum": 1
}0x3806 TOOLPARAMETER_INQUIRE
查询工具手参数
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手号 |
json
{
"toolNum": 2
}0x3807 TOOLPARAMETER_RESPOND
返回工具手参数
响应格式同 0x3805
0x380A TOOLNUMBER_SWITCH
切换工具手
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
| curToolNum | int | 当前工具手号 |
json
{
"robot": 1,
"curToolNum": 2
}0x380B TOOLNUMBER_INQUIRE
查询当前工具手
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
json
{
"robot": 1
}0x380C TOOLNUMBER_RESPOND
返回当前工具手
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
| curToolNum | int | 当前工具手号 |
json
{
"robot": 1,
"curToolNum": 2
}0x3812 TOOL_CALIBRATION_POINTS_POS_INQUIRE
查询已标定点数据
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6,共7个点 |
| toolNum | int | 工具手号 |
json
{
"pointNum": 0,
"toolNum": 1
}0x3813 TOOL_CALIBRATION_POINTS_POS_RESPOND
返回已标定点数据
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| pos | array[6] | 位置数据 [x,y,z,rx,ry,rz] |
json
{
"pointNum": 0,
"pos": [0, 0, 0, 0, 0, 0]
}
用户坐标校正
0x3C01 USERCALIBRATION_CALC
用户坐标校正设置
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
json
{
"userNum": 1
}0x3C02 USERCALIBRATION_RESULT
用户坐标校正结果返回
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| result | bool | true=标定成功,false=标定失败 |
| status.O | bool | O点状态 |
| status.X | bool | X点状态 |
| status.Y | bool | Y点状态 |
json
{
"result": true,
"status": {
"O": false,
"X": false,
"Y": false
}
}0x3C03 USERCALIBRATION_RECORD
标记用户原点、X、Y值
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 取值 "O", "X", "Y" 或 "OXY" |
| posZero | array[6] | 标记原点(弧度制),当inquire为"OXY"时存在 |
| posX | array[6] | 标记X值(弧度制),当inquire为"OXY"时存在 |
| posY | array[6] | 标记Y值(弧度制),当inquire为"OXY"时存在 |
json
{
"userNum": 1,
"inquire": "X",
"posZero": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
"posX": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
"posY": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
}0x3C04 USERCALIBRATION_RECORD_RESPOND
标记结果回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 取值 "O", "X", "Y" |
| status | bool | 状态 |
| pos | array[6] | 弧度制位置数据 |
| posDeg | array[6] | 角度制位置数据 |
json
{
"userNum": 1,
"inquire": "X",
"status": true,
"pos": [0, 0, 0, 0, 0, 0],
"posDeg": [0, 0, 0, 0, 0, 0]
}
0x3C07 USERPARAMETER_SET
用户坐标设置
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pos | array[6] | 用户坐标位置 [x,y,z,rx,ry,rz] |
| userNum | int | 用户坐标号 |
json
{
"pos": [460.0, 0.0, 637.0, 0.0, 3.10, 3.0],
"userNum": 1
}0x3C08 USERPOSDATA_INQUIRE
用户坐标查询
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 查询类型:"Calibration", "O", "X", "Y" |
json
{
"userNum": 1,
"inquire": "Calibration"
}0x3C09 USERPOSDATA_RESPOND
用户坐标查询回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 查询类型 |
| status | bool | 状态 |
| pos | array[6] | 弧度制位置数据 |
| posDeg | array[6] | 角度制位置数据 |
json
{
"userNum": 1,
"inquire": "Calibration",
"status": false,
"pos": [0, 0, 0, 0, 0, 0],
"posDeg": [0, 0, 0, 0, 0, 0]
}0x3C0A USERCOORDINATE_SWITCH
用户坐标号设置
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
| userNum | int | 用户坐标号 |
json
{
"robot": 1,
"userNum": 1
}0x3C0B USERCOORDINATE_INQUIRE
用户坐标号查询
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
json
{
"robot": 1
}0x3C0C USERCOORDINATE_RESPOND
用户坐标号查询回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
| curUserNum | int | 当前用户坐标号 |
json
{
"robot": 1,
"curUserNum": 1
}0x3C0D USERANNOTATION_SET
用户注释设置
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| note | string | 注释内容 |
| userNum | int | 用户坐标号 |
json
{
"note": "纳博特",
"userNum": 1
}0x3C0E USERANNOTATION_INQUIRE
用户注释查询
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
json
{
"userNum": 1
}0x3C0F USERANNOTATION_RESPOND
用户注释查询回复
响应格式同 0x3C0D

20点标定
0x7101 CALIBRATION_20POINTS_SET
20点标定完成,发送标定数据
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| calNum | int | 标定编号(暂为默认值) |
| noCalZero | bool | 20点不标定零点 |
json
{
"calNum": 1,
"noCalZero": true
}0x7102 CALIBRATION_20POINTS_INQUIRE
点击标定点数据
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手坐标系 1-3 |
| pointNum | int | 取值0~19,共20个点 |
json
{
"toolNum": 1,
"pointNum": 0
}0x7103 CALIBRATION_20POINTS_RESPOND
返回标定点数据
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 取值0~19,共20个点 |
| pos | array[6] | 点位数据 [x,y,z,rx,ry,rz] |
json
{
"pointNum": 0,
"pos": [0, 0, 0, 0, 0, 0]
}0x7104 CALIBRATION_20POINTS_RESULT
标定计算完成
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| result | bool | 计算是否正确 |
| distance | float | 计算距离值 |
json
{
"result": true,
"distance": 2.04
}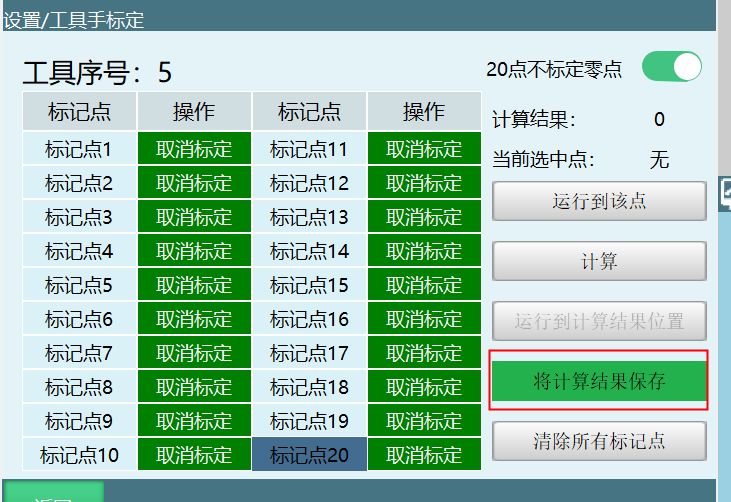
0x7105 CALIBRATION_20POINTS_RESULT_APPLY
将标定结果设置为工具手
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手坐标系 1-3 |
json
{
"toolNum": 1
}0x7106 CALIBRATION_20POINTS_RESULT_APPLY_OK
设置成功回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| apply | bool | 设置是否成功 |
json
{
"apply": true
}0x7107 CALIBRATION_20POINTS_STATUS_INQUIRE
查询标定点状态
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| calNum | int | 工具手号 |
json
{
"calNum": 1
}注意:底层是共用标定点状态,不区分工具手号
0x7108 CALIBRATION_20POINTS_STATUS_RESPOND
返回标定点状态
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| status | array[20] | 标定点状态:1=已标定,0=未标定 |
json
{
"status": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
}0x7109 CALIBRATION_20POINTS_STATUS_CLEAR
清除标定状态
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 取值:0-19单个点,20=所有点 |
json
{
"pointNum": 0
}0x710a CALIBRATION_20POINTS_POS_INQUIRE
查询已标定点数据
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 取值0~19,共20个点 |
json
{
"pointNum": 0
}0x710b CALIBRATION_20POINTS_POS_RESPOND
返回已标定点数据
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 取值0~19,共20个点 |
| pos | array[6] | 点位数据 [x,y,z,rx,ry,rz] |
json
{
"pointNum": 0,
"pos": [0, 0, 0, 0, 0, 0]
}0x710c CALIBRATION_20POINTS_POS_RUN
运动到标定点(暂不开放)
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 |
json
{
"robot": 1
}0x710d CALIBRATION_20POINTS_CANCALIBRATION_INQUIRE
获取是否可以打开标定界面
无请求参数
0x710e CALIBRATION_20POINTS_CANCALIBRATION_RESPOND
是否可以打开标定界面
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| canCalibration | bool | 是否可以打开 |
json
{
"canCalibration": true
}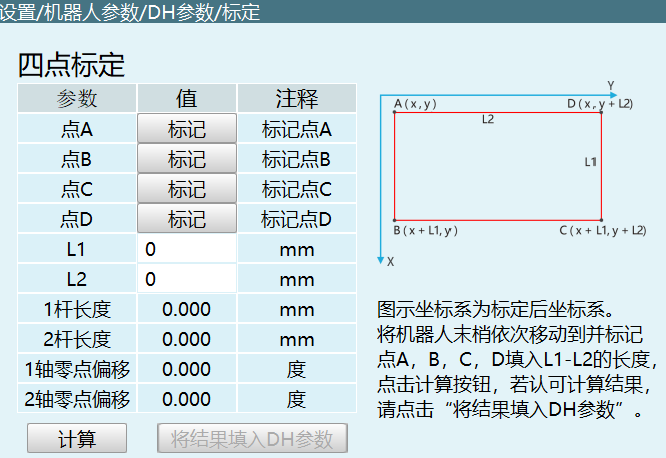
4点标定(SCARA)
0x7201 CALIBRATION_4POINTS_SET
设置距离输入值,计算并返回结果
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| ParamOf4Points | array[2] | L1, L2 杆长 |
json
{
"ParamOf4Points": [0, 0]
}0x7202 CALIBRATION_4POINTS_INQUIRE
点击标定按钮
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 取值0~3,共4个点 |
| status | int | 1=已标记,0=未标记 |
json
{
"pointNum": 0,
"status": 1
}0x7203 CALIBRATION_4POINTS_RESPOND
返回标定点数据
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 取值0~3,共4个点 |
| pos | array[6] | 点位数据 [x,y,z,rx,ry,rz] |
json
{
"pointNum": 0,
"pos": [0, 0, 0, 0, 0, 0]
}0x7204 CALIBRATION_4POINTS_RESULT
计算完成
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| result | bool | 计算结果 |
| length | array[2] | 长度 [L1, L2] |
| dtheta | array[2] | 偏移角度 |
json
{
"result": true,
"length": [0, 0],
"dtheta": [0, 0]
}0x7205 CALIBRATION_4POINTS_RESULT_APPLY
将结果填入DH参数
无请求参数
0x7206 CALIBRATION_4POINTS_RESULT_APPLY_OK
设置成功回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| apply | bool | 设置是否成功 |
json
{
"apply": true
}0x7207 CALIBRATION_4POINTS_STATUS_INQUIRE
查询4点标定点状态
无请求参数
0x7208 CALIBRATION_4POINTS_STATUS_RESPOND
返回4点标定状态
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| result | bool | 计算结果 |
| status | array[4] | 标定点状态:1=已标定,0=未标定 |
| length | array[2] | 长度 [L1, L2] |
| dtheta | array[2] | 偏移角度 |
json
{
"result": true,
"status": [0, 0, 0, 0],
"length": [0, 0],
"dtheta": [0, 0]
}