Appearance
1.运动控制
目录
机器人运动
机器人运行状态的查询与回复
示教器查询机器人的运行状态
命令字: 0x2304
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 选择机器人,取值范围 [1, 4] |
| jobfilename | string | 是 | 作业文件名(不包括后缀名) |
| suffix | string | 是 | 文件扩展名:.JBR主程序/.JBP后台局部程序/.JBPG后台全局程序 |
请求示例:
json
{
"robot": 1,
"jobfilename": "AAA",
"suffix": ".JBR"
}控制器回复机器人运行状态
命令字: 0x9103
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号,取值范围 [1, 4] |
| status | int | 运行状态:0-停止,1-暂停,2-运行 |
| continueRun | int | 是否存在断点执行:0/1 |
| currentRun | bool | 是否存在当前行运行:false/true |
| mainProgramRun | int | 主程序是否运行:0/1 |
响应示例:
json
{
"robot": 1,
"status": 0,
"continueRun": 0,
"currentRun": false,
"mainProgramRun": 0
}机器人运动控制
机器人关节运动 MOVJ
命令字: 0x4501
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 选择机器人,取值范围 [1, 4] |
| vel | int | 是 | 速度百分比,取值范围 [1, 100] |
| coord | int | 是 | 坐标系:0-关节坐标,1-直角坐标,2-用户坐标,3-工具坐标 |
| pos | double[7] | 是 | 目标位置,前7位为机器人本体目标位置,后5位为外部轴目标位置 |
请求示例:
json
{
"robot": 1,
"vel": 5,
"coord": 0,
"pos": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7]
}机器人直线运动 MOVL
命令字: 0x4502
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 选择机器人,取值范围 [1, 4] |
| vel | int | 是 | 速度 mm/s,取值范围 [1, 1000] |
| coord | int | 是 | 坐标系:0-关节坐标,1-直角坐标,2-用户坐标,3-工具坐标 |
| pos | double[7] | 是 | 目标位置,前7位为机器人本体目标位置,后5位为外部轴目标位置 |
请求示例:
json
{
"robot": 1,
"vel": 5,
"coord": 0,
"pos": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7]
}机器人圆弧运动 MOVC
命令字: 0x4503
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 选择机器人,取值范围 [1, 4] |
| vel | int | 是 | 速度 mm/s,取值范围 [1, 1000] |
| coord | int | 是 | 坐标系:0-关节坐标,1-直角坐标,2-用户坐标,3-工具坐标 |
| isFull | bool | 是 | false-MOVC,true-MOVCA |
| posOne | double[7] | 是 | 圆弧起始点,机器人本体点位 |
| posTwo | double[7] | 是 | 圆弧经过的中间点,机器人本体点位 |
| posThree | double[7] | 是 | 圆弧的目标点,机器人本体点位 |
请求示例:
json
{
"robot": 1,
"vel": 5,
"coord": 0,
"isFull": false,
"posOne": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7],
"posTwo": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7],
"posThree": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7]
}机器人样条曲线运动 MOVS
命令字: 0x4504
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 选择机器人,取值范围 [1, 4] |
| vel | int | 是 | 速度 mm/s,取值范围 [1, 1000] |
| coord | int | 是 | 坐标系:0-关节坐标,1-直角坐标,2-用户坐标,3-工具坐标 |
| size | int | 是 | 样条曲线的点数目,要求至少4个点位 |
| pos | double[][7] | 是 | 样条曲线的轨迹点位,二维数组 |
请求示例:
json
{
"robot": 1,
"vel": 5,
"coord": 0,
"size": 4,
"pos": [
[1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7],
[1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7],
[1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7],
[1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7]
]
}移动到目标点位
移动到目标点位
命令字: 0x3003 GO_POSITION
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| positionName | string | 是 | 目标点位名:SetPosition_EntrancePoint/SetPosition_AuxiliaryPoint/SetPosition_JobPoint |
| RobotPos | object | 是 | 机器人位置对象 |
RobotPos 内部参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| ctype | int | 类型:NONE_TYPE=0/P_TYPE/E_TYPE/RP_TYPE/AP_TYPE/GP_TYPE/GE_TYPE |
| data | double[21] | 位置数据数组,详见下方说明 |
| key | string | 变量类型 |
| paraVarData | array | 变量数组 |
data 数组说明:
| 索引位置 | 描述 |
|---|---|
| 第1、2位 | 坐标类型:0,0-关节坐标;1,1-直角坐标;2,1-工具坐标;3,1-用户坐标 |
| 第3位 | 左右手:1-左,2-右,0-无左右手(默认0) |
| 第4、5、6、7位 | 备用,默认0 |
| 第8-14位 | 机器人本体坐标值(7位):关节坐标下为1-6轴角度值,其他坐标下为x,y,z,a,b,c |
| 第15-19位 | 外部轴坐标值(最大5个外部轴,不足补零) |
请求示例:
json
{
"robot": 1,
"positionName": "SetPosition_JobPoint",
"RobotPos": {
"ctype": 0,
"key": "",
"data": [1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 6.0, 0.0, 6.0, 3.141590, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
"paraVarData": [
{"data": 1.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 1.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 6.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 6.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 3.141590, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""}
]
}
}说明: 程序中无对应指令
运动到作业文件点位
命令字: 0x3005 GO_JOBFILEPOSITION
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| jobName | string | 是 | 作业文件名称 |
| suffixname | string | 是 | 作业文件后缀名(如 .JBR) |
| posName | string | 是 | 点位名称 |
请求示例:
json
{
"robot": 1,
"jobName": "Q1",
"suffixname": ".JBR",
"posName": "P001"
}运动到用户坐标标定点位
命令字: 0x3006 GO_USERCALIBRATIONPOS
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
| userNum | int | 是 | 用户编号 |
| posType | int | 是 | 点位类型:0-原点,1-X值,2-Y值 |
请求示例:
json
{
"robot": 1,
"userNum": 1,
"posType": 0
}运动到复位点
命令字: 0x3007 GO_RESET_POSITION
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 |
请求示例:
json
{
"robot": 1
}回零命令
回零命令
命令字: 0x3002 GO_HOME
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| robot | int | 是 | 机器人编号(1-4) |
| type | int | 是 | 回零类型:0-机器人回零,1-外部轴回零 |
请求示例:
json
{
"robot": 1,
"type": 1
}机器人设置
点动速度设置
设置关节轴点动速度
命令字: 0x2604 JOG_JOINTPARAMETER_SET
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| AxisNum | int | 是 | 关节轴编号 |
| minTrajectTime.minAccTime | float | 是 | 最小加速度时间 |
| minTrajectTime.minDecTime | float | 是 | 最小减速度时间 |
| MaxSpeed | float | 是 | 关节轴最大点动速度,单位:度°/s |
| MaxAcc | float | 是 | 关节轴点动加速度,单位:度°/s² |
请求示例:
json
{
"AxisNum": 1,
"minTrajectTime": {
"minAccTime": 0.10,
"minDecTime": 0.10
},
"MaxSpeed": 10,
"MaxAcc": 10
}查询关节轴点动速度
发送命令字: 0x2605 JOG_JOINTPARAMETER_INQUIRE
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| AxisNum | int | 是 | 关节轴编号 |
返回命令字: 0x2606 JOG_JOINTPARAMETER_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| AxisNum | int | 关节轴编号 |
| MaxSpeed | float | 关节轴最大点动速度,单位:度°/s |
| MaxAcc | float | 关节轴点动加速度,单位:度°/s² |
响应示例:
json
{
"AxisNum": 1,
"MaxSpeed": 10,
"MaxAcc": 10
}设置直角坐标点动速度
命令字: 0x2607 JOG_RECTPARAMETER_SET
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| MaxSpeed | float | 是 | 关节轴最大点动速度,单位:mm/s |
| MaxAcc | float | 是 | 关节轴点动加速度,单位:mm/s² |
请求示例:
json
{
"MaxSpeed": 10,
"MaxAcc": 10
}查询直角坐标点动速度
发送命令字: 0x2608 JOG_RECTPARAMETER_INQUIRE
data: 空
返回命令字: 0x2609 JOG_RECTPARAMETER_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| MaxSpeed | float | 关节轴最大点动速度,单位:mm/s |
| MaxAcc | float | 关节轴点动加速度,单位:mm/s² |
响应示例:
json
{
"MaxSpeed": 10,
"MaxAcc": 10
}点动灵敏度设置
设置点动灵敏度
命令字: 0x260A JOG_SENSITIVITY_SET
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| Sensitivity | float | 是 | 灵敏度,单位:度,范围:0.001 - 1 |
请求示例:
json
{
"Sensitivity": 0.001
}查询点动灵敏度
发送命令字: 0x260B JOG_SENSITIVITY_INQUIRE
data: 空
返回命令字: 0x260C JOG_SENSITIVITY_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| Sensitivity | float | 灵敏度,单位:度,范围:0.001 - 1 |
响应示例:
json
{
"Sensitivity": 0.001
}当前位置获取
坐标模式说明
| 坐标模式值 | 说明 |
|---|---|
| -1 | 控制器当前坐标 |
| 0 | 关节坐标 (Joint) |
| 1 | 直角坐标 (Cart) |
| 2 | 工具坐标 (Tool) |
| 3 | 用户坐标 (User) |
| 4 | 电机位置 |
获取当前位置
发送命令字: 0x2A02 CURRENTPOS_INQUIRE
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 (1, 2, 3, 4) |
| coord | int | 是 | 坐标模式:-1-控制器当前坐标, 0-关节坐标, 1-直角坐标, 2-工具坐标, 3-用户坐标, 4-电机位置 |
请求示例:
json
{
"robot": 1,
"coord": 2
}返回命令字: 0x2A03 CURRENTPOS_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 (1, 2, 3, 4) |
| deg | int | 是否为ACS坐标系;0:是;1:不是 |
| pos | array | 弧度点位值,坐标值用7位存储关节坐标下。前六位为J1~J6轴角度值(度)或直角/工具/用户坐标XYZ(毫米),四到六位为ABC坐标值(弧度),第七位保留 |
| posDeg | array | 角度点位值,直角/工具/用户坐标下ABC弧度值转为角度值,其余状态数值与pos一致 |
| coord | int | 坐标模式:-1-控制器当前坐标, 0-关节坐标, 1-直角坐标, 2-工具坐标, 3-用户坐标, 4-电机位置 |
| configuration | int | 姿态或(SCARA)左右手 |
响应示例:
json
{
"robot": 1,
"deg": 1,
"pos": [0, 0.1, 2, 3.3, 44, 555.55, 0.0],
"posDeg": [0.0, 0.0, 1, 2, 3.3, 44, 5.55],
"coord": -1,
"configuration": 1
}查询电机速度
发送命令字: 0x2A04 CURRENTVEL_INQUIRE
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 (1, 2, 3, 4) |
请求示例:
json
{
"robot": 1
}返回命令字: 0x2A05 CURRENTVEL_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 (1, 2, 3, 4) |
| vel | array | 电机速度,4轴也发六个 |
| velSync | array | 外部轴电机速度 |
| maxVel | array | 最大电机速度 |
| maxVelSync | array | 最大外部轴电机速度 |
响应示例:
json
{
"robot": 1,
"vel": [0, 0, 0, 0, 0, 0],
"velSync": [0, 0, 0, 0, 0],
"maxVel": [0, 0, 0, 0, 0, 0],
"maxVelSync": [0, 0, 0, 0, 0]
}查询电机扭矩
发送命令字: 0x2A06 CURRENTTORQ_INQUIRE
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人编号 (1, 2, 3, 4) |
请求示例:
json
{
"robot": 1
}返回命令字: 0x2A07 CURRENTTORQ_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人编号 (1, 2, 3, 4) |
| torq | array | 电机扭矩 |
| theoTorq | array | 理论电机扭矩 |
| maxTorq | array | 电机最大扭矩 |
| maxTheoTorq | array | 理论电机最大扭矩 |
| maxTorqSync | array | 外部轴电机最大扭矩 |
| torqSync | array | 外部轴电机扭矩 |
响应示例:
json
{
"robot": 1,
"torq": [0, 0, 0, 0, 0, 0],
"theoTorq": [0, 0, 0, 0, 0, 0],
"maxTorq": [0, 0, 0, 0, 0, 0],
"maxTheoTorq": [0, 0, 0, 0, 0, 0],
"maxTorqSync": [0, 0, 0, 0, 0],
"torqSync": [0, 0, 0, 0, 0]
}运行参数设置
设置运行参数
命令字: 0x2801 INTERPOLATION_MODE_SET
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| absolutePosResolution | float | 是 | 绝对位置分辨率,范围:0.0001 - 0.1 度 |
| interpolationMethod | int | 是 | 机器人插补方式:0-S型, 1-梯形, 2-加加插补 |
| runDelayTime | int | 是 | 运行延时时间,范围:500 - 20000 毫秒 |
| stopTime | int | 是 | 暂停时间,范围:240 - 2000 毫秒 |
请求示例:
json
{
"absolutePosResolution": 0.010,
"interpolationMethod": 0,
"runDelayTime": 500,
"stopTime": 240
}查询运行参数
发送命令字: 0x2802 INTERPOLATION_MODE_INQUIRE
data: 无
返回命令字: 0x2803 INTERPOLATION_MODE_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| absolutePosResolution | float | 绝对位置分辨率,单位:度 |
| interpolationMethod | int | 机器人插补方式:0-S型, 1-梯形, 2-加加插补 |
| runDelayTime | int | 运行延时时间,单位:毫秒 |
| stopTime | int | 暂停时间,单位:毫秒 |
响应示例:
json
{
"absolutePosResolution": 0.010,
"interpolationMethod": 0,
"runDelayTime": 500,
"stopTime": 240
}查询机器人类型、数目
查询机器人类型
发送命令字: 0x2E02 ROBOT_TYPE_INQUIRE
data: null
返回命令字: 0x2E03 ROBOT_TYPE_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| type | int | 当前机器人类型 |
响应示例:
json
{
"type": 1
}机器人类型对照表:
| 类型值 | 说明 |
|---|---|
| 0 | 无 |
| 1 | 通用六轴串联多关节 |
| 2 | 四轴SCARA |
| 3 | 四轴码垛 |
| 4 | 四轴串联多关节 |
| 5 | 单轴 |
| 6 | 五轴串联多关节 |
| 7 | 6轴协作 |
| 8 | 二轴SCARA |
| 9 | 三轴SCARA |
| 10 | 三轴直角 |
| 11 | 三轴异形一 |
| 12 | 七轴串联多关节 |
| 13 | SCARA异形一 |
| 14 | 四轴码垛丝杆 |
| ... | 更多类型略 |
查询机器人数目
发送命令字: 0x2E05 ROBOT_SUM_INQUIRE
data: null
返回命令字: 0x2E06 ROBOT_SUM_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| sum | int | 机器人数目 |
响应示例:
json
{
"sum": 1
}设置机器人通讯周期
命令字: 0x2E07 CONTROL_CYCLE_SET
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| controlCycle | int | 是 | 通讯周期,范围:1, 2, 4, 8,控制器重启生效 |
| baudRate | string | 是 | CAN_OPEN的波特率 |
请求示例:
json
{
"controlCycle": 1,
"baudRate": "10K"
}查询机器人通讯周期
发送命令字: 0x2E08 CONTROL_CYCLE_INQUIRE
data: null
返回命令字: 0x2E09 CONTROL_CYCLE_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| controlCycle | int | 通讯周期 |
响应示例:
json
{
"controlCycle": 1
}查询控制器功能限制情况
发送命令字: 0x2E0B CONTROLLER_LIMIT_INQUIRE
data: null
返回命令字: 0x2E0C CONTROLLER_LIMIT_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| robotsum | int | 机器人个数 |
| maxRobotCount | int | 机器人最大数目 |
| robottypes | object | 机器人类型解锁状态,true-已解锁, false-未解锁 |
| craft | object | 工艺解锁状态,true-已解锁, false-未解锁 |
响应示例:
json
{
"robotsum": 2,
"maxRobotCount": 4,
"robottypes": {
"R_GENERAL_6S": false,
"R_SCARA": true,
"R_FOURAXIS_PALLET": true,
"R_FOURAXIS": true,
"R_GENERAL_1S": true,
"R_GENERAL_5S": true,
"R_GENERAL_6S_1": true,
"R_SCARA_TWOAXIS": true,
"R_SCARA_THREEAXIS": true,
"R_THREE_CARTESIAN_COORDINATE": true,
"R_THREE_CARTESIAN_COORDINATE_1": true,
"R_GENERAL_7S": true,
"R_SCARA_1": true,
"R_FOURAXIS_PALLET_1": true,
"R_FOUR_CARTESIAN_COORDINATE": true,
"R_SIXAXIS_SPRAY_BBR": true,
"R_FOUR_POLAR_COORDINATE_1": true,
"R_GENERAL_6S_2": true,
"R_GANTRY_WELD": true,
"R_DELTA": true,
"R_WINE_CHAMFER": true
},
"craft": {
"pallet": true,
"weld": false,
"lasercut": true,
"polish": true,
"spray": true,
"search": true,
"pun": true,
"vision": true
}
}外部轴运动
机器人外部轴关节运动 MOVJEXT
命令字: 0x4507
请求参数:
| 参数名 | 类型 | 必填 | 说明 | 取值范围 |
|---|---|---|---|---|
| robot | int | 是 | 选择机器人 | [1, 4] |
| vel | int | 是 | 速度 | [1, 100],单位:% |
| coord | int | 是 | 坐标系 | 0-关节坐标,1-直角坐标,2-用户坐标,3-工具坐标 |
| pos | double[12] | 是 | 目标位置:前7位为机器人本体目标位置,后5位为外部轴目标位置 | - |
请求示例:
json
{
"robot": 1,
"vel": 5,
"coord": 0,
"pos": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7, 1.0, 2.0, 3.0, 4.0, 5.0]
}机器人外部轴直线运动 MOVLEXT
命令字: 0x4508
请求参数:
| 参数名 | 类型 | 必填 | 说明 | 取值范围 |
|---|---|---|---|---|
| robot | int | 是 | 选择机器人 | [1, 4] |
| vel | int | 是 | 速度 | [1, 1000],单位:mm/s |
| coord | int | 是 | 坐标系 | 0-关节坐标,1-直角坐标,2-用户坐标,3-工具坐标 |
| pos | double[12] | 是 | 目标位置:前7位为机器人本体目标位置,后5位为外部轴目标位置 | - |
请求示例:
json
{
"robot": 1,
"vel": 5,
"coord": 0,
"pos": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7, 1.0, 2.0, 3.0, 4.0, 5.0]
}机器人外部轴圆弧运动 MOVCEXT
命令字: 0x4509
请求参数:
| 参数名 | 类型 | 必填 | 说明 | 取值范围 |
|---|---|---|---|---|
| robot | int | 是 | 选择机器人 | [1, 4] |
| vel | int | 是 | 速度 | [1, 1000],单位:mm/s |
| coord | int | 是 | 坐标系 | 0-关节坐标,1-直角坐标,2-用户坐标,3-工具坐标 |
| posOne | double[12] | 是 | 圆弧起始点:前7位为机器人本体目标位置,后5位为外部轴目标位置 | - |
| posTwo | double[12] | 是 | 圆弧经过的中间点:前7位为机器人本体目标位置,后5位为外部轴目标位置 | - |
| posThree | double[12] | 是 | 圆弧的目标点:前7位为机器人本体目标位置,后5位为外部轴目标位置 | - |
请求示例:
json
{
"robot": 1,
"vel": 5,
"coord": 0,
"posOne": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7, 1.0, 2.0, 3.0, 4.0, 5.0],
"posTwo": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7, 1.0, 2.0, 3.0, 4.0, 5.0],
"posThree": [1.1, 2.2, 3.3, 4.4, 5.5, 6.6, 7.7, 1.0, 2.0, 3.0, 4.0, 5.0]
}外部轴移动到目标点
命令字: 0x3004 (GO_SYNCPOSITION)
RobotPos 结构说明
| 字段 | 类型 | 说明 |
|---|---|---|
| ctype | int | P类型:NONE_TYPE=0, P_TYPE, E_TYPE, RP_TYPE, AP_TYPE, GP_TYPE, GE_TYPE |
| data | double[21] | 位置数据数组,详见下方数组索引说明 |
| key | string | 变量类型 |
| paraVarData | array | 变量数据数组 |
data 数组索引说明
| 索引位置 | 含义 | 说明 |
|---|---|---|
| 0, 1 | 坐标系标识 | 0 0-关节坐标,1 1-直角坐标,2 1-工具坐标,3 1-用户坐标 |
| 2 | 左右手 | 1-左,2-右,0-无左右手(默认0) |
| 3, 4, 5, 6 | 备用 | 默认0 |
| 7 ~ 13 | 机器人本体坐标 | 7位,关节坐标下表示1-6轴角度值,其他坐标下表示x,y,z,a,b,c |
| 14 ~ 18 | 外部轴坐标 | 最大支持5个外部轴,只有关节值,不足补零 |
请求示例:
json
{
"RobotPos": {
"ctype": 0,
"data": [1.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 6.0, 0.0, 6.0, 3.141590, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
"key": "",
"paraVarData": [
{"data": 1.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 1.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 6.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 6.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 3.141590, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""}
]
},
"robot": 1
}外部轴设置
1. 变位机坐标校正计算设置
命令ID: 0x7001 SYNCPOSITIONER_CALIBRATION_SET
说明: 变位机坐标校正计算设置,发送如下指令
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| calibrateNum | int | 是 | 变位机组号,可选值:1, 2, 3 |
请求示例:
json
{
"calibrateNum": 1
}控制器返回命令ID: 0x7004 SYNCPOSITIONER_CALIBRATION_RESULT
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| result | bool | 外部轴数据计算是否成功 |
响应示例:
json
{
"result": true
}2. 标定点坐标
命令ID: 0x7002 SYNCPOSITIONER_CALIBRATION_INQUIRE
说明: 标定点坐标,发送如下指令
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| syncPositionerNum | int | 是 | 变位机组号,可选值:1, 2, 3 |
| pointNum | int | 是 | 取值范围:0~3 或 5 |
请求示例:
json
{
"syncPositionerNum": 1,
"pointNum": 0
}控制器回复命令ID: 0x7003 SYNCPOSITIONER_CALIBRATION_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| syncPositionerNum | int | 变位机组号,可选值:1, 2, 3 |
| pointNum | int | 取值范围:0~3 或 5 |
| pos | array | 当前点位 |
响应示例:
json
{
"syncPositionerNum": 1,
"pointNum": 0,
"pos": [0, 0, 0, 0, 0, 0]
}3. 查询所有外部轴的标定结果
命令ID: 0x7005 SYNCPOSITIONER_TYPEANDCALIBRATIONRESULT_INQUIRE
说明: 查询所有外部轴的标定结果
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人号 |
请求示例:
json
{
"robot": 1
}返回命令ID: 0x7006 SYNCPOSITIONER_TYPEANDCALIBRATIONRESULT_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人号 |
| calibrateResult | array | 是否已标定,数组表示外部轴组号是否已标定 |
| syncType | array | 同步类型 |
响应示例:
json
{
"robot": 1,
"calibrateResult": [false, false, true],
"syncType": [1, 1, 1]
}4. 标定结果查询
命令ID: 0x7007 SYNCPOSITIONER_COORD_INQUIRE
说明: 标定结果查询(示教器无此功能)
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| syncPositionerNum | int | 是 | 变位机组号 |
| coordNum | int | 是 | 获取标定结果 |
请求示例:
json
{
"syncPositionerNum": 1,
"coordNum": 0
}回复命令ID: 0x7008 SYNCPOSITIONER_COORD_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| syncPositionerNum | int | 变位机组号 |
| coordNum | int | 标定结果编号 |
| pos | array | 当前点位 |
响应示例:
json
{
"syncPositionerNum": 1,
"coordNum": 1,
"pos": [0, 0, 0, 0, 0, 0]
}5. 设置当前协作外部轴组号
命令ID: 0x7009 SYNCPOSITIONER_COORDNUM_SWITCH
说明: 设置当前协作外部轴组号
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| curSyncPositionerNum | int | 是 | 当前协作外部轴组号 |
请求示例:
json
{
"curSyncPositionerNum": 3
}查询当前协作外部轴组号:
命令ID: 0x700A SYNCPOSITIONER_COORDNUM_INQUIRE
说明: 无需发送数据
控制器回复命令ID: 0x700B SYNCPOSITIONER_COORDNUM_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| curSyncPositionerNum | int | 当前协作外部轴组号 |
响应示例:
json
{
"curSyncPositionerNum": 2
}6. 设置地轨参数
命令ID: 0x700D SYNCTRACK_SET
说明: 设置地轨参数,示教盒发送下面命令
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| calibrateResult | bool | 是 | 是否协作 |
| xConversionRatio | float | 是 | x方向转换比 |
| yConversionRatio | float | 是 | y方向转换比 |
| zConversionRatio | float | 是 | z方向转换比 |
请求示例:
json
{
"calibrateResult": true,
"xConversionRatio": 1.0,
"yConversionRatio": 1.0,
"zConversionRatio": 1.0
}查询命令ID: 0x700E SYNCTRACK_INQUIRE
控制器回复命令ID: 0x700F SYNCTRACK_RESPOND
响应示例:
json
{
"calibrateResult": true,
"xConversionRatio": 1.0,
"yConversionRatio": 1.0,
"zConversionRatio": 1.0
}7. 当前位置查询
命令ID: 0x7012 SYNC_POS_INQUIRE
说明: 外部轴设置界面,示教盒发送下面命令
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | int | 是 | 机器人号 |
| coord | int | 是 | 坐标模式 - -1: 控制器当前坐标 - 0: 关节坐标 - 1: 直角坐标 - 2: 工具坐标 - 3: 用户坐标 |
请求示例:
json
{
"robot": 1,
"coord": 0
}控制器回复命令ID: 0x7013 SYNC_POS_RESPOND
说明: 复位点设置界面,控制器收到当前位置查询时发送
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | int | 机器人号 |
| coord | int | 坐标模式 - -1: 控制器当前坐标 - 0: 关节坐标 - 1: 直角坐标 - 2: 工具坐标 - 3: 用户坐标 |
| configuration | int | 姿态或左右手 |
| pos | array | 当前位置(弧度制) |
| posDeg | array | 当前位置(角度制) |
| posSync | array | 外部轴当前位置 |
响应示例:
json
{
"robot": 1,
"coord": 0,
"configuration": 1,
"pos": [0, 0.1, 2, 3.3, 44, 555.55, 66.6, 77.77],
"posDeg": [0, 0.1, 2, 3.3, 44, 555.55, 66.6, 77.77],
"posSync": [0, 0.1, 2, 3.3, 44, 555.55, 66.6, 77.77]
}8. 双机协作使能
设置双机协作使能指令命令ID: 0x7015 COOPERATIVE_SET
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| cooperativeRobot | int | 是 | 协作设置 - 0: 无协作 - 1: 协作 |
请求示例:
json
{
"cooperativeRobot": 0
}获取协作状态命令ID: 0x7016 COOPERATIVE_INQUIRE
回复协作状态命令ID: 0x7017 COOPERATIVE_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| cooperativeRobot | int | 协作状态 - 0: 无协作 - 1: 协作 |
响应示例:
json
{
"cooperativeRobot": 0
}9. 外部轴关节参数设置
命令ID: 0x7021 JOINTPARAMETER_SYNCPOSITIONER_SET
说明: 外部轴关节参数设置
单轴变位机
请求示例:
json
{
"Joint": [
{
"BackLash": 0.0,
"DeRatedVel": -30000.0,
"Direction": 1.0,
"EncoderResolution": 17.0,
"MaxAcc": 1.0,
"MaxDeRotSpeed": -1.0,
"MaxDecel": -1.0,
"MaxRotSpeed": 1.0,
"maxJerkAcc": 1.0,
"maxJerkDec": -1.0,
"NegSWLimit": -360.0,
"PosSWLimit": 720.0,
"RatedDeRotSpeed": -5000.0,
"RatedRotSpeed": 5000.0,
"RatedVel": 30000.0,
"ReducRatio": 1.0,
"syncAxisNum": 1,
"syncGroupNum": 1
}
],
"syncGroupNum": 1
}双轴变位机
请求示例:
json
{
"Joint": [
{
"BackLash": 0.0,
"DeRatedVel": -18000.0,
"Direction": 1.0,
"EncoderResolution": 17.0,
"MaxAcc": 1.0,
"MaxDeRotSpeed": -1.0,
"MaxDecel": -1.0,
"MaxRotSpeed": 1.0,
"NegSWLimit": -100.0,
"PosSWLimit": 100.0,
"RatedDeRotSpeed": -3000.0,
"RatedRotSpeed": 3000.0,
"RatedVel": 18000.0,
"ReducRatio": 1.0,
"maxJerkAcc": 1.0,
"maxJerkDec": -1.0,
"syncAxisNum": 1,
"syncGroupNum": 2
},
{
"BackLash": 0.0,
"DeRatedVel": -12000.0,
"Direction": -1.0,
"EncoderResolution": 17.0,
"MaxAcc": 1.0,
"MaxDeRotSpeed": -1.0,
"MaxDecel": -1.0,
"MaxRotSpeed": 1.0,
"NegSWLimit": -80.0,
"PosSWLimit": 80.0,
"RatedDeRotSpeed": -2000.0,
"RatedRotSpeed": 2000.0,
"RatedVel": 12000.0,
"ReducRatio": 1.0,
"maxJerkAcc": 1.0,
"maxJerkDec": -1.0,
"syncAxisNum": 2,
"syncGroupNum": 2
}
],
"syncGroupNum": 2
}Joint 参数说明:
| 参数名 | 类型 | 说明 |
|---|---|---|
| BackLash | float | 齿轮反向间隙 |
| DeRatedVel | float | 额定负向速度 |
| Direction | float | 正反向:1.0表示正向 |
| EncoderResolution | float | 编码器分辨率(位数) |
| MaxAcc | float | 最大加速度 |
| MaxDeRotSpeed | float | 最大反转速度 |
| MaxDecel | float | 最大减速度 |
| MaxRotSpeed | float | 最大正转速度 |
| maxJerkAcc | float | 最大加加速度 |
| maxJerkDec | float | 最大减减速度 |
| NegSWLimit | float | 反向限位角度 |
| PosSWLimit | float | 正向限位角度 |
| RatedDeRotSpeed | float | 额定反转速 |
| RatedRotSpeed | float | 额定正转速 |
| RatedVel | float | 额定速度 |
| ReducRatio | float | 关节减速比 |
| syncAxisNum | int | 轴数 |
| syncGroupNum | int | 同步组号 |
根级参数说明:
| 参数名 | 类型 | 说明 |
|---|---|---|
| syncGroupNum | int | 同步组号 |
查询关节参数命令ID: 0x7022 JOINTPARAMETER_SYNCPOSITIONER_INQUIRE
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| syncGroupNum | int | 是 | 同步组号 |
请求示例:
json
{
"syncGroupNum": 1
}关节参数返回命令ID: 0x7023 JOINTPARAMETER_SYNCPOSITIONER_RESPOND
说明: 同 0x7021
10. 外部轴点动关节速度设置
命令ID: 0x7024 JOG_JOINTPARAMETER_SYNCPOSITIONER_SET
说明: 外部轴点动关节速度设置
力学功能
1. 碰撞检测
碰撞检测开关设置
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7406 | COLLISION_DETECTION_SET |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| switch | bool | 是 | 碰撞检测开关 |
请求示例:
json
{
"switch": true
}获取碰撞检测开关状态
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7407 | COLLISION_DETECTION_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7408 | COLLISION_DETECTION_RESPOND |
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| is_identification | bool | 辨识状态 |
| restrart_switch | bool | 重启开关 |
| switch | bool | 碰撞检测开关 |
响应示例:
json
{
"is_identification": true,
"restrart_switch": true,
"switch": true
}碰撞检测参数设置
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7409 | COLLISION_DETECTION_PARAM_SET |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| Co_De_para | array[double] | 是 | 阈值,数组长度6 |
| error_enable_time | double | 是 | 误差允许时间 |
| pos_delay_time | double | 是 | 指令位置响应时间 |
请求示例:
json
{
"Co_De_para": [3.0, 4.0, 5.0, 6.0, 7.0, 8.0],
"error_enable_time": 2.0,
"pos_delay_time": 1.0
}获取碰撞检测参数
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x740A | COLLISION_DETECTION_PARAM_INQUIRE |
请求参数: 无
控制器回复命令字: 0x740B COLLISION_DETECTION_PARAM_RESPOND
响应参数: 同 0x7409
2. 力矩前馈
力矩前馈开关设置
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x740C | TORQ_FEEDBACK_SET |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| torqFeedback | bool | 是 | 力矩前馈开关 |
请求示例:
json
{
"torqFeedback": true
}查询力矩前馈状态
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x740D | TORQ_FEEDBACK_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x740E | TORQ_FEEDBACK_RESPOND |
响应参数: 同 0x740C
3. 拖动示教
查询拖动示教
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7501 | DRAG_TRAJ_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7502 | DRAG_TRAJ_RESPOND |
响应参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| TrajName | array[string] | 是 | 轨迹名列表 |
响应示例:
json
{
"TrajName": ["RRR", "TTT"]
}拖动示教参数设置
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7504 | DRAG_PARAM_SET |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| DecareLimit | double | 是 | 笛卡尔空间线速度限制 |
| JointVelLimit | double | 是 | 关节空间速度限制 |
| drag_mode | int | 是 | 拖动模式:0-自由拖动,1-位置拖动,2-姿态拖动 |
| frictionOffset | array[double] | 是 | 1-6关节摩擦力补偿校正系数 |
| dragCoefficient | array[double] | 是 | 关节超限阻力系数,长度6,范围[1,100] |
请求示例:
json
{
"DecareLimit": 1.0,
"JointVelLimit": 2.0,
"drag_mode": 0,
"frictionOffset": [3.0, 3.0, 3.0, 3.0, 3.0, 3.0],
"dragCoefficient": [5.0, 5.0, 5.0, 5.0, 5.0, 5.0]
}获取拖动示教参数
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7505 | DRAG_PARAM_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7506 | DRAG_PARAM_RESPOND |
响应参数: 同 0x7504
4. 拖拽轨迹相关
拖动示教轨迹回放参数设置
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7507 | DRAG_TRAJ_PARAM_SET |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| MaxSamplingNum | double | 是 | 最大采样点数 |
| SamplingInterval | double | 是 | 采样间隔 |
| Start | bool | 是 | false-结束,true-开始 |
请求示例:
json
{
"MaxSamplingNum": 3000.0,
"SamplingInterval": 0.030,
"Start": false
}查询拖拽轨迹参数
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7508 | DRAG_TRAJ_PARAM_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7509 | DRAG_TRAJ_PARAM_RESPOND |
响应参数: 同 0x7507
查询轨迹是否被记录
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x750A | DRAG_TRAJ_RECORD_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x750B | DRAG_TRAJ_RECORD_RESPOND |
响应参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| record | bool | 是 | 拖拽轨迹是否被记录 |
响应示例:
json
{
"record": true
}轨迹回放
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x750C | DRAG_TRAJ_PLAYBACK |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| trajName | string | 是 | 轨迹名 |
| vel | int | 是 | 轨迹回放速度,示教器固定发送100 |
请求示例:
json
{
"trajName": "",
"vel": 100
}保存轨迹
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x750D | DRAG_TRAJ_SAVE |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| TrajName | string | 是 | 轨迹名 |
请求示例:
json
{
"TrajName": "SSSSS"
}删除轨迹
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x750E | DRAG_TRAJ_DELETE |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| TrajName | string | 是 | 轨迹名 |
请求示例:
json
{
"TrajName": "SSSSS"
}拖拽模式设置
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x750F | DRAG_MODE |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| mode | int | 是 | 拖拽模式:0-无,1-3D鼠标,2-力矩 |
| port | int | 是 | 外部触发信号端口号 |
| value | int | 是 | 外部触发信号值 |
请求示例:
json
{
"mode": 2,
"port": 3,
"value": 1
}查询拖拽模式
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7510 | DRAG_MODE_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7511 | DRAG_MODE_RESPOND |
响应参数: 同 0x750F
5. 外部按键
查询功能控制参数
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x9114 | FUNCTIONALCONTROL_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x9115 | FUNCTIONALCONTROL_RESPOND |
数组下标说明:0-拖拽模式,1-点动模式,2-开始轨迹采集,3-结束轨迹采集,4-开始轨迹回放,5-上使能,6-下使能,7-夹爪开,8-夹爪关,9-保存轨迹
响应参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| IoInPortArr | array[int] | 是 | 触发端口(DIN),数组长度11 |
| hardwareTypeArr | array[int] | 是 | 硬件类型:0-IO,数组长度11 |
| modeArr | array[int] | 是 | 触发方式:0-长按触发端口,1-短按触发端口,数组长度11 |
| parameterArr | array[int] | 是 | 参数:0-触发端口关闭时触发,1-触发端口打开时触发,数组长度11 |
响应示例:
json
{
"IoInPortArr": [1, 2, 3, 4, 5, 0, 6, 7, 8, 9, 10],
"hardwareTypeArr": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
"modeArr": [0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0],
"parameterArr": [0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0]
}状态提示查询
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x9116 | STATUSPROMPT_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x9117 | STATUSPROMPT_RESPOND |
数组下标说明:0-拖拽模式,1-点动模式,2-开始轨迹采集,3-结束轨迹采集,4-开始轨迹回放,5-上使能,6-下使能,7-夹爪开,8-夹爪关
响应参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| IoDoutPortArr | array[int] | 是 | 触发端口(DOUT),数组长度11 |
| hardwareTypeArr | array[int] | 是 | 硬件类型:0-IO,数组长度11 |
| parameterArr | array[int] | 是 | 参数:0-触发端口关闭,1-触发端口打开,2-闪烁,数组长度11 |
响应示例:
json
{
"IoDoutPortArr": [1, 2, 3, 4, 5, 0, 6, 7, 0, 0, 0],
"hardwareTypeArr": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
"parameterArr": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
}设置外部按键参数
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x9118 | EXTERNKEYPARA_SET |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| _isFunctionalControl | bool | 是 | true-设置功能控制参数,false-设置状态提示参数 |
| hardwareTypeArr | array[int] | 是 | 硬件类型:0-IO,数组长度11 |
| isClearTrack | int | 是 | 保存后是否清除轨迹 |
| modeArr | array[int] | 是 | 触发方式:0-长按触发端口,1-短按触发端口,数组长度11 |
| parameterArr | array[int] | 是 | 参数,数组长度11 |
| portArr | array[int] | 是 | 触发端口,数组长度11 |
请求示例:
json
{
"_isFunctionalControl": true,
"hardwareTypeArr": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
"isClearTrack": 1,
"modeArr": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
"parameterArr": [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0],
"portArr": [1, 2, 3, 4, 5, 0, 6, 7, 8, 9, 10]
}6. 动力学参数
动力学辨识只支持正装普通6轴,空载,辨识相关参数设置
轨迹参数设置
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7601 | TRAJECTORY_PARAM_SET |
请求参数:
| 参数名 | 类型 | 必填 | 描述 |
|---|---|---|---|
| traSize | double | 是 | 轨迹范围 |
| traVel | double | 是 | 轨迹速度 |
请求示例:
json
{
"traSize": 10.0,
"traVel": 100.0
}查询辨识轨迹参数
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7602 | TRAJECTORY_PARAM_INQUIRE |
请求参数: 无
控制器回复
| 字段 | 类型 | 描述 |
|---|---|---|
| 0x7603 | TRAJECTORY_PARAM_RESPOND |
队列模式运动通讯
1. socket控制追加模式运动
1.1 开启/关闭socket直接控制运动模式
开启后会进入特殊的运行模式,关闭后需要手动切回示教模式。
消息ID: 0x50B1 DIRECTMOTION_MODE_SET
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | number | 是 | 机器人编号(1, 2, 3, 4) |
| open | boolean | 是 | true=开启, false=关闭 |
请求示例:
json
{
"robot": 1,
"open": true
}1.2 控制器返回开启成功/失败
消息ID: 0x50B3 DIRECTMOTION_MODE_RESPOND
响应参数:
| 参数名 | 类型 | 说明 |
|---|---|---|
| robot | number | 机器人编号 |
| open | boolean | 当前状态 |
响应示例:
json
{
"robot": 1,
"open": true
}1.3 发送作业文件指令队列
消息ID: 0x50B4 DIRECTMOTION_INSERT_INSTRVEC
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | number | 是 | 机器人编号 |
| data | array | 是 | 指令json列表 |
data 数组元素参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| type | number | 是 | 指令类型:1=点到,2=直线,3=圆弧,4=整圆 |
| positionId | string | 条件 | 全局点位(使用全局GP点时必填) |
| RobotPos | object | 条件 | 自定义点位(使用自动点位时必填) |
| ParaACC | object | 是 | 加速度参数 |
| ParaDEC | object | 是 | 减速度参数 |
| ParaV | object | 是 | 速度参数 |
| ParaPL | object | 是 | 平滑参数 |
| ParaTIME | object | 是 | 提前执行时间(ms) |
| ParaSPIN | object | 否 | 圆弧和整圆指令:0=姿态不变 1=六轴不转 2=六轴旋转 |
| ParaSYNC | object | 否 | 变位机是否同步 |
| imovecoord | string | 否 | 移动坐标系 |
| ctype | number | 否 | 坐标系类型 |
| length | number | 否 | 长度 |
| radius | number | 否 | 半径 |
| margin | number | 否 | 边界 |
| offsetAxis | number | 否 | 轴偏移 |
| polish | number | 否 | 打磨参数 |
| polishAngle | number | 否 | 打磨角度 |
| polishID | number | 否 | 打磨ID |
| posidname | string | 否 | 点位名称 |
| posidtype | number | 否 | 点位类型 |
| logout | boolean | 否 | 登出 |
| para | number | 否 | 预留参数 |
| side | number | 否 | 侧面 |
| userParamInt | number | 否 | 用户自定义整数 |
| userParamString | string | 否 | 用户自定义字符串 |
| width | number | 否 | 宽度 |
ParaACC / ParaDEC / ParaV / ParaPL / ParaTIME / ParaSPIN / ParaSYNC 参数结构:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| data | number | 是 | 参数值 |
| m_vUnit | number | 条件 | 速度单位(ParaV时必填):0=cm/s 1=mm/s 2=百分比 |
| secondvalue | number | 否 | 第二值 |
| value | number | 否 | 旧版参数值 |
| varname | string | 否 | 变量名 |
RobotPos 参数结构:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| ctype | number | 是 | 坐标系类型:0-关节 1-直角 2-工具 3-用户 |
| data | array | 是 | 位置数据数组 |
| key | string | 否 | 键名 |
| paraVarData | array | 否 | 参数变量数据 |
data 数组坐标说明(ctype 决定坐标系):
| 索引 | 名称 | 说明 |
|---|---|---|
| 0 | 坐标系 | 0-关节、1-直角、2-工具、3-用户 |
| 1 | 单位 | 角度-0、弧度-1 |
| 2 | 形态 | 形态值 |
| 3 | 工具工艺号 | 工具编号 |
| 4 | 用户工艺号 | 用户编号 |
| 5-6 | 预留 | 预留字段 |
| 7 | J1/X | X坐标值 |
| 8 | J2/Y | Y坐标值 |
| 9 | J3 | J3值 |
| 10 | J4 | J4值 |
| 11 | J5 | J5值 |
| 12 | J6 | J6值 |
| 13 | J7 | J7值 |
| 14-19 | 预设值 | 预设位置数据 |
1.4 案例一:采用全局GP点
json
{
"data": [
{
"ParaACC": {"data": 25.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaDEC": {"data": 25.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaPL": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaSPIN": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaSYNC": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaTIME": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaV": {"data": 25.0, "m_vUnit": 2, "secondvalue": 0, "value": 0, "varname": ""},
"ctype": 0,
"imovecoord": "UF",
"length": 0.0,
"logout": false,
"margin": 0.0,
"offsetAxis": 0,
"para": 0,
"polish": 0,
"polishAngle": 0.0,
"polishID": 1,
"posidname": "",
"posidtype": 0,
"positionId": "GP0015",
"radius": 0.0,
"side": 0.0,
"type": 1,
"userParamInt": 0,
"userParamString": "",
"width": 0.0
},
{
"ParaACC": {"data": 100.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaDEC": {"data": 100.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaPL": {"data": 5.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaSPIN": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaSYNC": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaTIME": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaV": {"data": 1000.0, "m_vUnit": 1, "secondvalue": 0, "value": 0, "varname": ""},
"ctype": 0,
"imovecoord": "UF",
"length": 0.0,
"logout": false,
"margin": 0.0,
"offsetAxis": 0,
"para": 0,
"polish": 0,
"polishAngle": 0.0,
"polishID": 1,
"posidname": "",
"posidtype": 0,
"positionId": "GP0001",
"radius": 0.0,
"side": 0.0,
"type": 2,
"userParamInt": 0,
"userParamString": "",
"width": 0.0
}
],
"robot": 1
}1.5 案例二:采用自动点位
json
{
"data": [
{
"ParaACC": {"data": 10.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaDEC": {"data": 10.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaPL": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaSPIN": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaSYNC": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaTIME": {"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
"ParaV": {"data": 10.0, "m_vUnit": 2, "secondvalue": 0, "value": 0, "varname": ""},
"RobotPos": {
"ctype": 1,
"data": [0.0, 0.0, 8.0, 0.0, 0.0, 0.0, 0.0, 0.999998884198, 1.999999207078, 2.999999330055, 3.999999217981, 4.999999652293, 5.999998732478, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
"key": "",
"paraVarData": [
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 8.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.999998884198, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 1.999999207078, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 2.999999330055, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 3.999999217981, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 4.999999652293, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 5.999998732478, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""},
{"data": 0.0, "secondvalue": 0, "value": 0, "varname": ""}
]
},
"ctype": 0,
"imovecoord": "UF",
"length": 0.0,
"logout": false,
"margin": 0.0,
"offsetAxis": 0,
"para": 0,
"polish": 0,
"polishAngle": 0.0,
"polishID": 1,
"posidname": "",
"posidtype": 0,
"positionId": "",
"radius": 0.0,
"side": 0.0,
"type": 1,
"userParamInt": 0,
"userParamString": "",
"width": 0.0
}
],
"robot": 1
}1.6 暂停追加运行
消息ID: 0x50B7 DIRECTMOTION_MODE_SUSPEND
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | number | 是 | 机器人编号(1, 2, 3, 4) |
请求示例:
json
{
"robot": 1
}1.7 开始追加运行(暂停后使用)
消息ID: 0x50B8 DIRECTMOTION_MODE_START
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | number | 是 | 机器人编号(1, 2, 3, 4) |
请求示例:
json
{
"robot": 1
}1.8 停止追加运行
消息ID: 0x50B9 DIRECTMOTION_MODE_STOP
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | number | 是 | 机器人编号(1, 2, 3, 4) |
请求示例:
json
{
"robot": 1
}1.9 设置队列模式停止不下电
消息ID: 0x50BA
请求参数:
| 参数名 | 类型 | 必填 | 说明 |
|---|---|---|---|
| robot | number | 是 | 机器人编号(1, 2, 3, 4) |
请求示例:
json
{
"robot": 1
}标定
工具手标定
0x3801 TOOLCALIBRATION_SET
设置工具手标定
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手号 |
| calibrationPointNum | int | 设置6点标定或7点标定 |
请求示例:
json
{
"toolNum": 2,
"calibrationPointNum": 6
}0x3804 TOOLCALIBRATION_RESULT
标定计算完成回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| result | bool | 计算是否成功 |
响应示例:
json
{
"result": true
}
0x3802 TOOLCALIBRATION_INQUIRE
查询标定点数据
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| toolNum | int | 工具手号 |
请求示例:
json
{
"pointNum": 2,
"toolNum": 1
}0x3803 TOOLCALIBRATION_RESPOND
返回标定点数据
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| pos | array[6] | 位置数据 [x,y,z,rx,ry,rz] |
响应示例:
json
{
"pointNum": 2,
"pos": [0, 0, 0, 0, 0, 0]
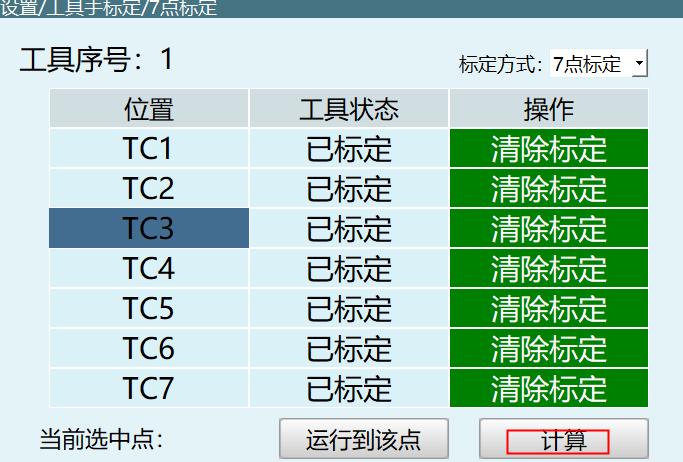
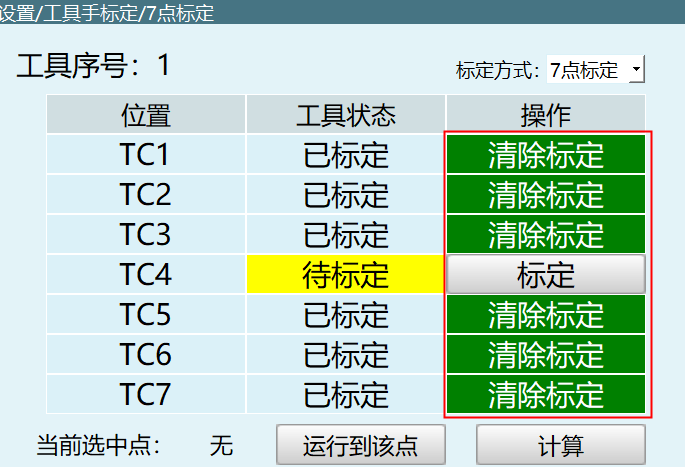
}0x3815 TOOL_CALIBRATION_POINTS_STATUS_INQUIRE
查询标定状态
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手号 |
请求示例:
json
{
"toolNum": 2
}0x3816 TOOL_CALIBRATION_POINTS_STATUS_RESPOND
返回标定状态
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| status | array[7] | 标定状态:1=已标定,0=待标定 |
响应示例:
json
{
"status": [1, 0, 1, 0, 1, 0, 1]
}0x3817 TOOL_CALIBRATION_POINTS_STATUS_CLEAR
清除标定
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| toolNum | int | 工具手号 |
请求示例:
json
{
"pointNum": 2,
"toolNum": 1
}
0x3805 TOOLPARAMETER_SET
设置工具手参数
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| tool.A | float | 绕A轴旋转角度 |
| tool.B | float | 绕B轴旋转角度 |
| tool.C | float | 绕C轴旋转角度 |
| tool.note | string | 注释 |
| tool.payload_inertia | float | 负载惯量 |
| tool.payload_mass | float | 负载质量 |
| tool.payload_mass_center_X | float | 负载质心X |
| tool.payload_mass_center_Y | float | 负载质心Y |
| tool.payload_mass_center_Z | float | 负载质心Z |
| tool.x | float | X轴偏移 |
| tool.y | float | Y轴偏移 |
| tool.z | float | Z轴偏移 |
| toolNum | int | 工具手号 |
请求示例:
json
{
"tool": {
"A": 3.0,
"B": 3.0,
"C": 3.0,
"note": "",
"payload_inertia": 5.0,
"payload_mass": 4.0,
"payload_mass_center_X": 6.0,
"payload_mass_center_Y": 7.0,
"payload_mass_center_Z": 8.0,
"x": 1.0,
"y": 2.0,
"z": 3.0
},
"toolNum": 1
}0x3806 TOOLPARAMETER_INQUIRE
查询工具手参数
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| toolNum | int | 工具手号 |
请求示例:
json
{
"toolNum": 2
}0x3807 TOOLPARAMETER_RESPOND
返回工具手参数
响应格式同 0x3805
0x380A TOOLNUMBER_SWITCH
切换工具手
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
| curToolNum | int | 当前工具手号 |
请求示例:
json
{
"robot": 1,
"curToolNum": 2
}0x380B TOOLNUMBER_INQUIRE
查询当前工具手
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
请求示例:
json
{
"robot": 1
}0x380C TOOLNUMBER_RESPOND
返回当前工具手
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
| curToolNum | int | 当前工具手号 |
响应示例:
json
{
"robot": 1,
"curToolNum": 2
}0x3812 TOOL_CALIBRATION_POINTS_POS_INQUIRE
查询已标定点数据
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6,共7个点 |
| toolNum | int | 工具手号 |
请求示例:
json
{
"pointNum": 0,
"toolNum": 1
}0x3813 TOOL_CALIBRATION_POINTS_POS_RESPOND
返回已标定点数据
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pointNum | int | 下标0~6 |
| pos | array[6] | 位置数据 [x,y,z,rx,ry,rz] |
响应示例:
json
{
"pointNum": 0,
"pos": [0, 0, 0, 0, 0, 0]
}
用户坐标校正
0x3C01 USERCALIBRATION_CALC
用户坐标校正设置
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
请求示例:
json
{
"userNum": 1
}0x3C02 USERCALIBRATION_RESULT
用户坐标校正结果返回
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| result | bool | true=标定成功,false=标定失败 |
| status.O | bool | O点状态 |
| status.X | bool | X点状态 |
| status.Y | bool | Y点状态 |
响应示例:
json
{
"result": true,
"status": {
"O": false,
"X": false,
"Y": false
}
}0x3C03 USERCALIBRATION_RECORD
标记用户原点、X、Y值
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 取值 "O", "X", "Y" 或 "OXY" |
| posZero | array[6] | 标记原点(弧度制),当inquire为"OXY"时存在 |
| posX | array[6] | 标记X值(弧度制),当inquire为"OXY"时存在 |
| posY | array[6] | 标记Y值(弧度制),当inquire为"OXY"时存在 |
请求示例:
json
{
"userNum": 1,
"inquire": "X",
"posZero": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
"posX": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
"posY": [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
}0x3C04 USERCALIBRATION_RECORD_RESPOND
标记结果回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 取值 "O", "X", "Y" |
| status | bool | 状态 |
| pos | array[6] | 弧度制位置数据 |
| posDeg | array[6] | 角度制位置数据 |
响应示例:
json
{
"userNum": 1,
"inquire": "X",
"status": true,
"pos": [0, 0, 0, 0, 0, 0],
"posDeg": [0, 0, 0, 0, 0, 0]
}
0x3C07 USERPARAMETER_SET
用户坐标设置
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| pos | array[6] | 用户坐标位置 [x,y,z,rx,ry,rz] |
| userNum | int | 用户坐标号 |
请求示例:
json
{
"pos": [460.0, 0.0, 637.0, 0.0, 3.10, 3.0],
"userNum": 1
}0x3C08 USERPOSDATA_INQUIRE
用户坐标查询
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 查询类型:"Calibration", "O", "X", "Y" |
请求示例:
json
{
"userNum": 1,
"inquire": "Calibration"
}0x3C09 USERPOSDATA_RESPOND
用户坐标查询回复
响应参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| userNum | int | 用户坐标号 |
| inquire | string | 查询类型 |
| status | bool | 状态 |
| pos | array[6] | 弧度制位置数据 |
| posDeg | array[6] | 角度制位置数据 |
响应示例:
json
{
"userNum": 1,
"inquire": "Calibration",
"status": false,
"pos": [0, 0, 0, 0, 0, 0],
"posDeg": [0, 0, 0, 0, 0, 0]
}0x3C0A USERCOORDINATE_SWITCH
用户坐标号设置
请求参数:
| 参数名 | 类型 | 描述 |
|---|---|---|
| robot | int | 机器人编号 1-4 |
| userNum | int | 用户坐标号 |
请求示例:
json
{
"robot": 1,
"userNum": 1
}3D鼠标控制
设置灵敏度发送
0x7301 THREED_MOUSE_SET
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ABC | int | 姿态ABC |
| mouseSen | int[4] | 鼠标灵敏度xyz和姿态灵敏度(0-300) |
请求示例:
json
{
"ABC": 4,
"mouseSen": [128, 128, 128, 128]
}获取灵敏度
0x7302 THREED_MOUSE_INQUIRE
data: 无
控制器回复
0x7303 THREED_MOUSE_RESPOND
响应参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| ABC | int | 姿态ABC |
| mouseSen | int[4] | 鼠标灵敏度xyz和姿态灵敏度(0-300) |
响应示例:
json
{
"ABC": 4,
"mouseSen": [128, 128, 128, 128]
}3D鼠标零点标记零点发送
0x7304 THREED_MOUSE_SETZERO
data: 无
获取零点标记状态
0x7305 THREED_MOUSE_SETZERO_INQUIRE
data: 无
控制器回复
0x7306 THREED_MOUSE_SETZERO_RESPOND
响应参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| zeroTagged | int | 0:未标记,1:已标记,2:通讯失败 |
响应示例:
json
{
"zeroTagged": 0
}3D鼠标正方向标记设置
0x7307 THREED_MOUSE_SIGN_DIRECTION
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| axis | int | 1表示标记X正方向,2:Y,3:Z |
请求示例:
json
{
"axis": 1
}获取3D鼠标正方向标记状态
0x7308 THREED_MOUSE_SIGN_DIRECTION_INQUIRE
data: 无
获取3D鼠标正方向标记状态,控制器回复
0x7309 THREED_MOUSE_SIGN_DIRECTION_RESPOND
响应参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| xTagged | int | X正方向 0:失败,1:成功,2:标定中 |
| yTagged | int | Y正方向 0:失败,1:成功,2:标定中 |
| zTagged | int | Z正方向 0:失败,1:成功,2:标定中 |
响应示例:
json
{
"xTagged": 0,
"yTagged": 0,
"zTagged": 0
}退出页面时示教器发送
0x730A PAGE_BACK
请求参数:
| 参数 | 类型 | 说明 |
|---|---|---|
| pageBack | int | 3D鼠标点标记方向但未标记,直接切换界面时通知控制器退出标记方向线程 |
请求示例:
json
{
"pageBack": 1
}设置3D鼠标端口号
0x730B THREED_MOUSE_SET_PORT
请求参数:
| 参数 | 类型 | 说明 | 取值范围 |
|---|---|---|---|
| port | int | 端口号 | 1-10 |
请求示例:
json
{
"port": 1
}查询3D鼠标端口号
0x730C THREED_MOUSE_INQUIRE_PORT
data: {}
返回查询结果
0x730D THREED_MOUSE_RESPOND_PORT
响应参数:
| 参数 | 类型 | 说明 | 取值范围 |
|---|---|---|---|
| port | int | 端口号 | 1-10 |
响应示例:
json
{
"port": 1
}